
Con l'evoluzione della produzione automobilistica verso soluzioni altamente flessibili e intelligenti, cresce l'esigenza di automatizzare le linee di produzione con una maggiore adattabilità ambientale e versatilità operativa. Grazie alla loro forma e capacità di movimento umanoidi, i robot umanoidi sono chiamati a svolgere compiti come l'ispezione mobile e l'assemblaggio di precisione, attività che i robot industriali tradizionali faticano a gestire in ambienti di assemblaggio finale complessi. Questo li rende una direzione fondamentale per migliorare la flessibilità e l'efficienza delle linee di produzione.

In questo contesto, APQ ha lanciato la soluzione dual-brain KiWiBot30, che dota i robot umanoidi della capacità di eseguire operazioni di alta precisione negli scenari di assemblaggio finale del settore automobilistico. Questa soluzione supporta sistemi di visione in grado di rilevare difetti di saldatura con una precisione millimetrica. Allo stesso tempo, grazie al controllo coordinato multi-asse, consente una presa e un posizionamento precisi dei componenti. Rispetto ai robot industriali tradizionali, limitati a postazioni fisse e programmi preimpostati, i sistemi dotati del dual-brain KiWiBot30 dimostrano la possibilità di ispezione mobile autonoma e assemblaggio flessibile, aprendo una nuova strada tecnologica per affrontare le sfide della produzione intelligente del futuro.
Punti critici sulla linea di produzione: l'abisso che l'automazione tradizionale non può superare
Nella produzione di fascia alta, il controllo qualità e l'assemblaggio flessibile sono diventati colli di bottiglia critici per l'ammodernamento del settore. Prendendo come esempio la produzione automobilistica, l'ispezione delle saldature della carrozzeria richiede l'identificazione di difetti a livello micrometrico e l'assemblaggio di componenti di precisione richiede un controllo coordinato multiasse. Le attrezzature tradizionali si trovano ad affrontare tre sfide principali:
-
Ritardo di risposta:Il rilevamento visivo e l'esecuzione del movimento presentano ritardi dell'ordine di centinaia di millisecondi, causando perdite di efficienza nelle linee di produzione ad alta velocità.
-
Potenza di calcolo frammentata:Percezione, processo decisionale e controllo del movimento sono processi separati, con capacità insufficienti per l'elaborazione di dati multimodali.
-
Vincoli spaziali:Il torso del robot ha uno spazio di installazione molto limitato, il che rende difficile alloggiare i controller convenzionali.
Questi punti critici costringono le aziende a sacrificare l'efficienza aggiungendo postazioni manuali o a investire milioni nell'ammodernamento completo delle linee di produzione. L'impiego di robot intelligenti dotati di controller di ultima generazione sulle linee di produzione promette di superare questo stallo.

Collaborazione tra i due cervelli: la chiave per una risposta in millisecondi
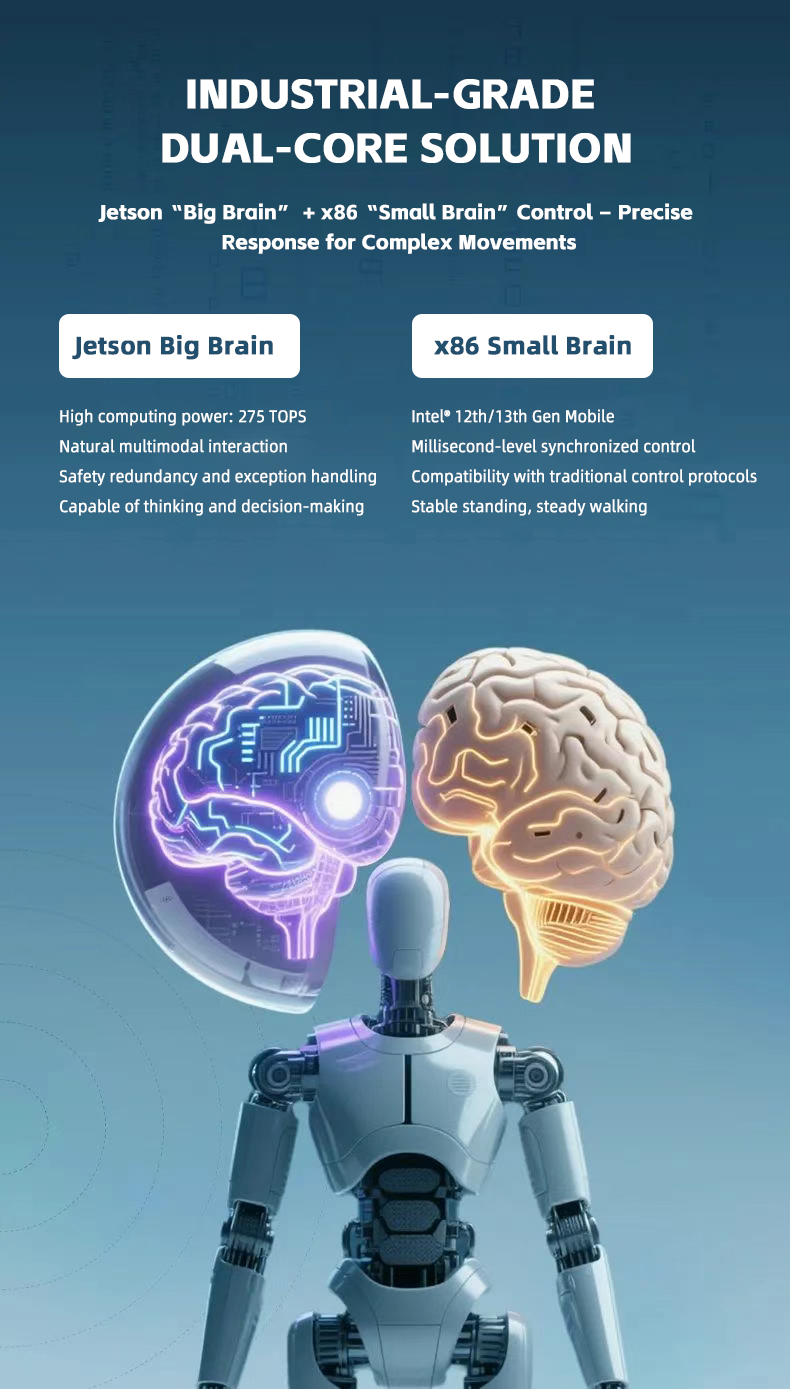
Nella prima metà del 2025, i prodotti della serie KiWiBot di Apuqi sono stati spesso presenti alle principali fiere di robotica. Questo dispositivo, delle dimensioni di un palmo, adotta un'innovativa architettura a doppio cervello:
-
Percezione cerebrale di Jetson:Offre una potenza di calcolo di 275 TOPS, in grado di elaborare in tempo reale quattro canali di flussi video ad alta definizione, supportando l'analisi rapida dei difetti di saldatura sulle linee di produzione automobilistiche.
-
x86 Motion Brain:Consente il controllo coordinato multiasse, riducendo le oscillazioni dei comandi a livello di microsecondi e migliorando efficacemente l'efficienza e la precisione di assemblaggio.
I due cervelli sono interconnessi tramite canali ad alta velocità per costruire un sistema a circuito chiuso di "percezione-decisione-esecuzione". Quando il sistema visivo rileva una deviazione di assemblaggio, il sistema motorio può eseguire istantaneamente delle correzioni compensative, realizzando una vera e propria coordinazione "occhio-mano".
Validazione rigorosa: affidabilità di livello industriale forgiata attraverso test ripetuti
Grazie a test approfonditi, le prestazioni del KiWiBot30 si sono avvicinate agli standard quasi automobilistici, dimostrando un'eccezionale resistenza e stabilità:
1. La scheda madre è rivestita con un triplo strato protettivo per resistere alla corrosione da nebbia d'olio.
2. Il sistema di raffreddamento integrato riduce il volume del 40% mantenendo le stesse prestazioni.
3. I test comprendono scenari estremi come ampie fluttuazioni di temperatura, urti e vibrazioni.
Di fronte all'ondata di produzione automobilistica che si sta orientando verso un'elevata flessibilità e intelligenza, Apuqi comprende a fondo la missione cruciale svolta dai sistemi di controllo principali dei robot intelligenti dotati di corpo.

In qualità di fornitore specializzato di soluzioni hardware e software per il "doppio cervello" dei robot intelligenti incarnati, Apuqi ha sempre aderito alla cultura aziendale di "Affidabilità, quindi affidabilità". Continuiamo a coltivare il campo dell'intelligenza incarnata, concentrandoci sullo sviluppo di piattaforme hardware stabili e affidabili e di sistemi software efficienti e collaborativi. Il nostro impegno è quello di fornire ai nostri clienti soluzioni complete che coprano ogni aspetto, dal controllo centrale all'integrazione di sistema, completate da servizi premium professionali ed efficienti. Insieme ai nostri partner, ci impegniamo a promuovere l'innovazione e l'adozione di robot umanoidi nella produzione automobilistica e in applicazioni industriali più ampie. Grazie a una solida base tecnologica, rendiamo possibile il futuro illimitato della produzione intelligente.
Se siete interessati alla nostra azienda e ai nostri prodotti, non esitate a contattare il nostro rappresentante all'estero, Robin.
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
Data di pubblicazione: 3 luglio 2025


