
En el context de l'onada global d'intel·ligència incorporada, el rendiment dels controladors de robots s'ha convertit en un determinant clau del seu nivell d'intel·ligència.La sèrie KiWiBot de controladors de robot intel·ligents incorporats d'APQofereix solucions innovadores per al control de moviment d'alta precisió a través de tecnologies innovadoresdisseny domèstic i una arquitectura de control col·laboratiu de "cervell gran-cervell petit".

01.
Iteració tecnològica: doble avenç en volum i rendiment
Els robots incorporats imposen requisits estrictes als controladors, incloent-himida compacta, alt rendiment, alta integració, alta estabilitat, alta capacitat en temps real i baix sorollLa sèrie de controladors APQ KiWiBot, al llarg de tres generacions d'evolució tecnològica, ha anat abordant gradualment els punts febles dels controladors tradicionals:
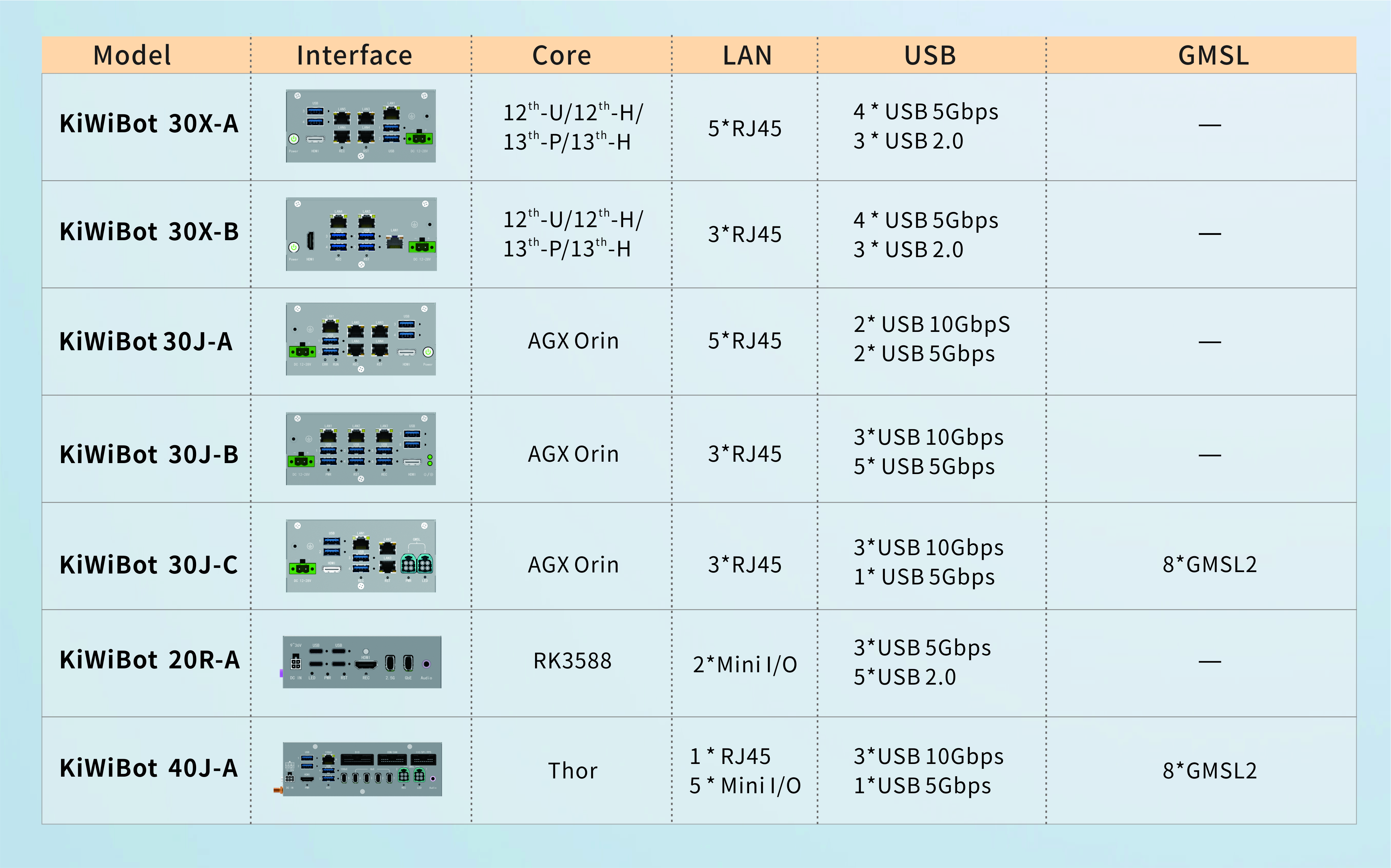
Elcontrolador de segona generacióes basa en l'arquitectura X86+Orin, oferint avantatges com aramodels diversos, selecció flexible, forta escalabilitat i mida compacta.
Elcontrolador de tercera generacióoptimitza encara més el rendiment general, amb connectors que adopten unsolució de cablejat d'automòbils, millorant significativament la fiabilitat.

Recomanació del model de controlador "Core Cerebellum and Cerebrum"
02.
Quatre modes d'instal·lació: flexibles per adaptar-se a diversos escenaris
El controlador ofereix quatre mètodes d'instal·lació per garantir una adaptabilitat òptima en diversos escenaris d'aplicació.
●Instal·lació muntada a la carcassaMillora la resistència estructural i la resistència als impactes, millorant el rendiment de protecció del medi ambient
●Instal·lació sense closcaDimensions ideals per al palmell de la mà, el sistema de triple refrigeració garanteix un funcionament silenciós i estable
●Instal·lació costat a costatEstructura robusta, fàcil manteniment
●Instal·lació apiladaAltament integrat, estalvi d'espai, adequat per a escenaris amb espai restringit
Tota la sèrie adopta un disseny de grau industrial, amb una excel·lent adaptabilitat ambiental i una escalabilitat flexible.

03.
Avantatge principal: Potenciació del control de moviment de precisió
Els principals avantatges d'aquest controlador resideixen en la seva excepcionalen temps realrendiment i precisiósincronització de tempscapacitats, proporcionant un suport crític per al control de moviment d'alta precisió. Tant si es tracta derobòtica mòbil, automatització industrial o aplicacions especialitzades, garanteix un rendiment operatiu estable i fiable.
Presumeix de robustesacompatibilitat electromagnètica (EMC)icapacitats antiinterferències, combinat amb una excel·lent resistència a les vibracions, garanteix un funcionament estable en entorns electromagnètics complexos. El disseny modular permet el funcionament independent de cada component, millorant significativament la fiabilitat i el manteniment del sistema.

A mesura que la indústria de la robòtica avança cap a una major precisió i flexibilitat, l'arquitectura de control de moviment està experimentant una evolució significativa, des del processament centralitzat fins a la col·laboració distribuïda. El controlador APQ KiWiBot, mitjançant un disseny domèstic i una innovadora arquitectura col·laborativa de "cervell gran i petit", no només aborda els reptes del control d'alta precisió, sinó que també proporciona a la indústria una base tècnica autosuficient i controlable, obrint un nou camí tecnològic per a la Xina en la competència global de la intel·ligència incorporada.
Data de publicació: 14 de novembre de 2025