
Tungod sa kalibutanong balud sa embodied intelligence, ang performance sa mga robot controller nahimong usa ka importanteng determinant sa ilang lebel sa intelligence.Ang serye sa KiWiBot sa mga embodied intelligent robot controllers gikan sa APQnagtanyag og bag-ong mga solusyon para sa high-precision motion control pinaagi sa mga inobatibodisenyo sa panimalay ug usa ka arkitektura sa kolaborasyon nga "dako-utok-gamay-utok".

01.
Teknolohikal nga Pag-usab: Dobleng mga Kalampusan sa Gidaghanon ug Pagganap
Ang mga robot nga gisudlan sa lawas nagpahamtang ug estrikto nga mga kinahanglanon sa mga controller, lakip na angcompact nga gidak-on, taas nga performance, taas nga integration, taas nga stability, taas nga real-time nga kapabilidad, ug ubos nga noiseAng serye sa mga controller sa APQ KiWiBot, latas sa tulo ka henerasyon sa ebolusyon sa teknolohiya, hinay-hinay nga nakatubag sa mga problema sa tradisyonal nga mga controller:
Angikaduhang henerasyon nga controllergibase sa arkitektura sa X86+Orin, nga nagtanyag og mga bentaha sama salain-laing mga modelo, flexible nga pagpili, lig-on nga scalability, ug compact nga gidak-on.
Angikatulong henerasyon nga controllerdugang nga nag-optimize sa kinatibuk-ang performance, uban sa mga konektor nga nagsagop sa usa kasolusyon sa wiring harness sa awto, nga nagpalambo pag-ayo sa kasaligan.

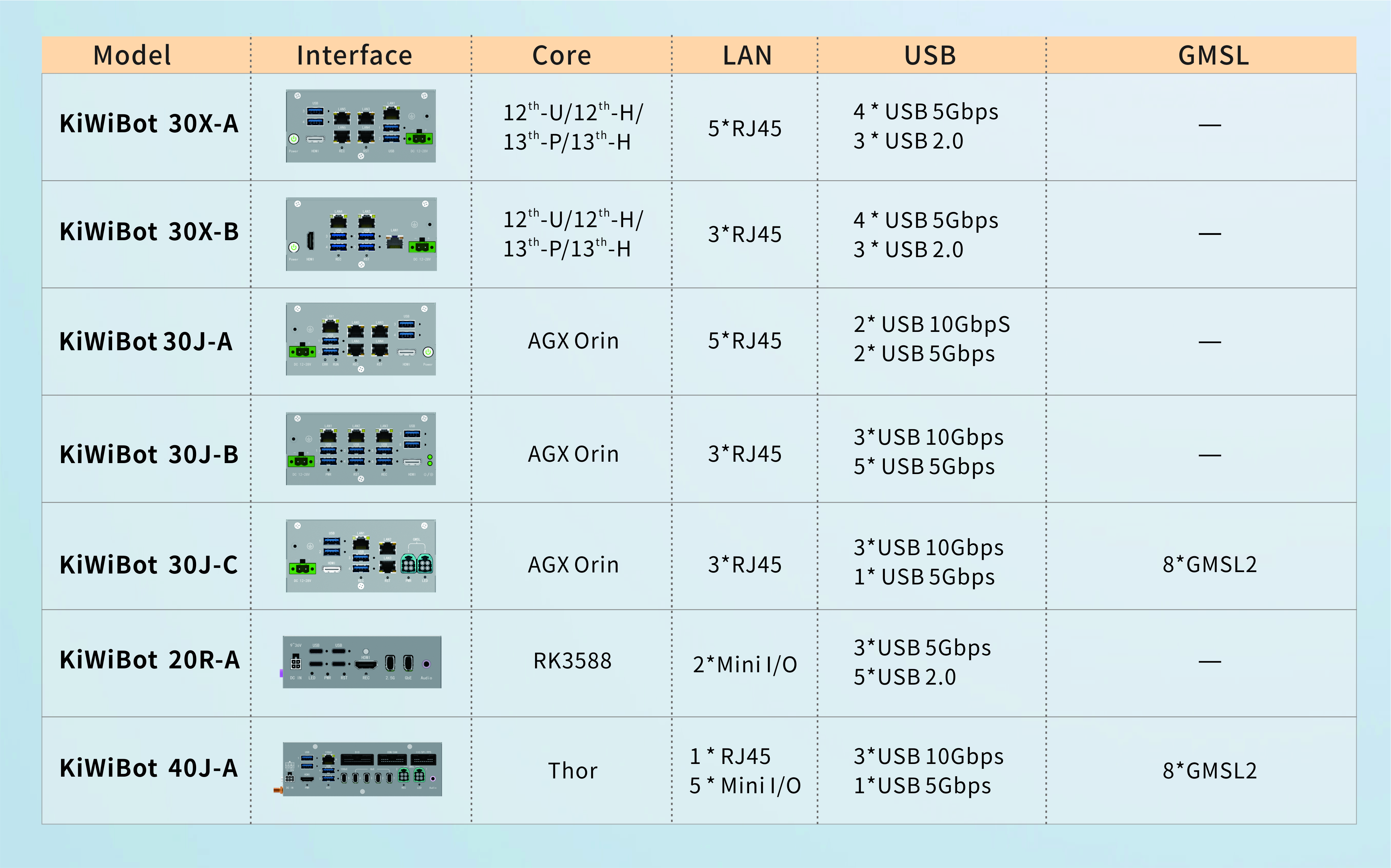
Rekomendasyon sa Modelo sa Tigkontrol sa "Core Cerebellum ug Cerebrum"
02.
Upat ka mga paagi sa pag-instalar: flexible aron mohaom sa lainlaing mga senaryo
Ang controller nagtanyag og upat ka pamaagi sa pag-instalar aron masiguro ang labing maayong pagkaangay sa lain-laing mga sitwasyon sa aplikasyon.
●Pag-instalar nga gibutang sa kabhang: Nagpalambo sa kalig-on sa istruktura ug resistensya sa impact, nga nagpauswag sa performance sa pagpanalipod sa kalikopan
●Pag-instalar nga walay kabhang: Sulundon nga gidak-on sa palad, ang triple cooling system nagsiguro sa hilom ug lig-on nga operasyon
●Pag-instalar nga magkatapad: Lig-on nga istruktura, dali nga pagmentinar
●Gipundok nga Pag-instalar: Kusganon nga pagkahiusa, makadaginot sa espasyo, angay alang sa mga senaryo nga limitado ang espasyo
Ang tibuok serye naggamit ug industrial-grade nga disenyo, nga adunay maayo kaayong pagkaangay sa kalikopan ug flexible nga pagka-scalable.

03.
Kinauyokan nga Bentaha: Pagpalig-on sa Precision Motion Control
Ang pangunang bentaha niining controller anaa sa talagsaon ngatinuod nga orasperformance ug tukmapag-synchronize sa orasmga kapabilidad, nga naghatag ug kritikal nga suporta para sa high-precision motion control. Bisan samobile robotics, industrial automation, o espesyal nga mga aplikasyon, kini nagsiguro sa lig-on ug kasaligan nga operasyon.
Kini mapasigarbuhon nga lig-onelektromagnetikong pagkaangay (EMC)ugmga kapabilidad sa pagbatok sa pagpanghilabot, inubanan sa maayo kaayong resistensya sa pag-uyog, nga nagsiguro sa lig-on nga operasyon sa komplikado nga mga palibot sa electromagnetic. Ang modular nga disenyo nagtugot sa independente nga pag-andar sa matag sangkap, nga labi nga nagpalambo sa kasaligan ug pagmentinar sa sistema.

Samtang ang industriya sa robotics nag-uswag padulong sa mas taas nga katukma ug mas dako nga pagka-flexible, ang arkitektura sa motion control nag-agi sa usa ka hinungdanon nga ebolusyon gikan sa sentralisadong pagproseso ngadto sa distributed collaboration. Ang APQ KiWiBot controller, pinaagi sa domestic design ug innovative nga "big and small brain" collaborative architecture, dili lamang nagtubag sa mga hagit sa high-precision control apan naghatag usab sa industriya og self-reliant ug controllable technical foundation, nga nagbukas sa usa ka bag-ong teknolohikal nga dalan alang sa China sa global embodied intelligence competition.
Oras sa pag-post: Nob-14-2025