
In u cuntestu di l'onda glubale di l'intelligenza incarnata, a prestazione di i cuntrullori di robot hè diventata un determinante chjave di u so livellu d'intelligenza.A serie KiWiBot di cuntrolli di robot intelligenti incorporati da APQoffre suluzioni rivoluzionarie per u cuntrollu di u muvimentu d'alta precisione attraversu tecniche innovativecuncepimentu domesticu è una architettura di cuntrollu collaborativu "grande cervellu-picculu cervellu".

01.
Iterazione Tecnologica: Doppie Avanzate in Volume è Prestazioni
I robot incarnati imponenu esigenze rigorose à i cuntrolli, cumpresedimensione compatta, alte prestazioni, alta integrazione, alta stabilità, alta capacità in tempu reale è bassu rumoreA serie di cuntrolli APQ KiWiBot, attraversu trè generazioni d'evoluzione tecnologica, hà trattatu gradualmente i punti di difficultà di i cuntrolli tradiziunali:
Ucontroller di seconda generazionesi basa nantu à l'architettura X86+Orin, offrendu vantaghji cum'èmudelli diversi, selezzione flessibile, forte scalabilità è dimensioni compatte.
Ucontroller di terza generazioneottimizza ulteriormente e prestazioni generali, cù i connettori chì aduttanu unsuluzione di cablaggio automobilisticu, aumentendu significativamente l'affidabilità.

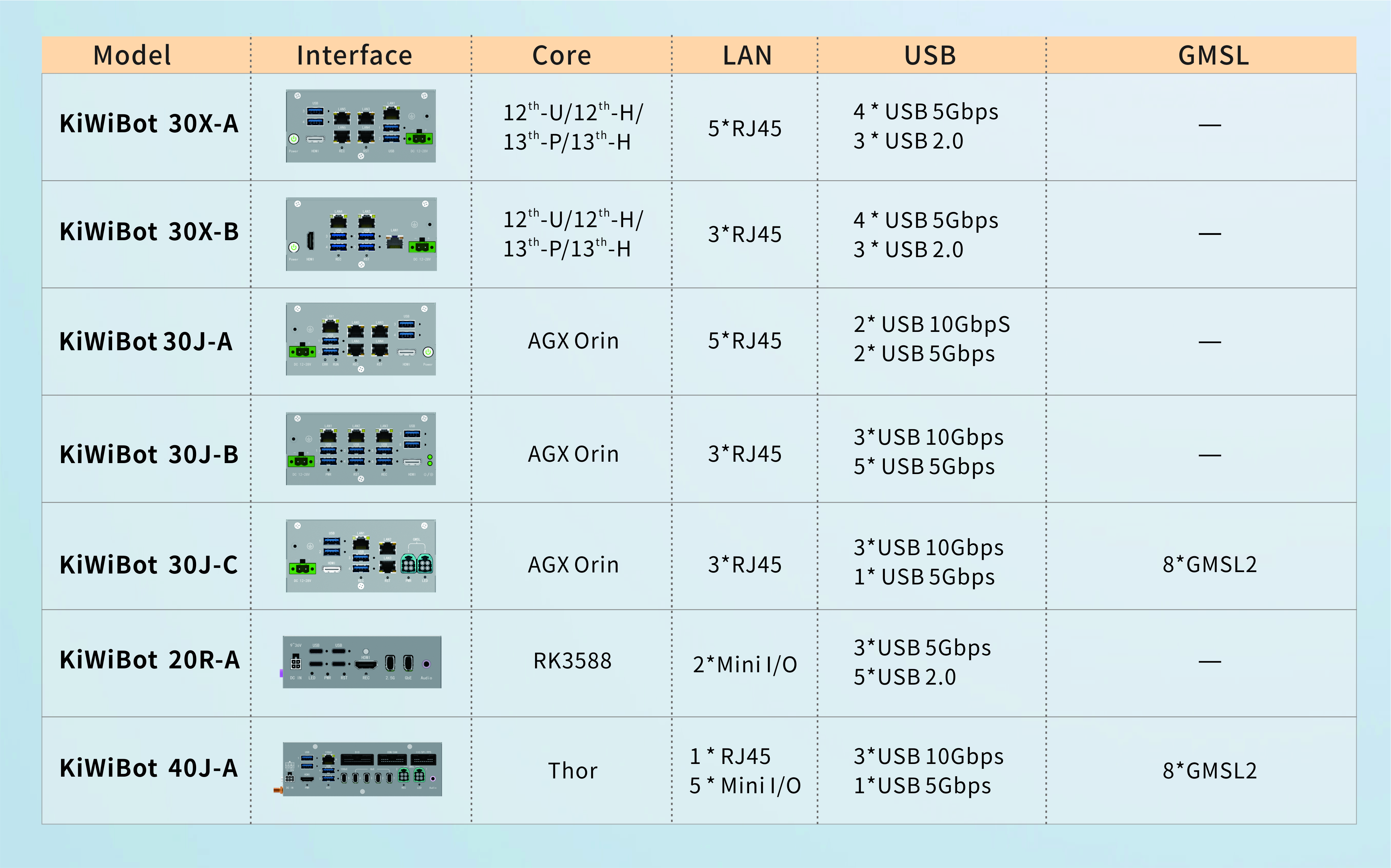
Raccomandazione di u mudellu di u controller "Core Cerebellum and Cerebrum"
02.
Quattru modi d'installazione: flessibili per adattassi à diversi scenarii
U controller offre quattru metudi d'installazione per assicurà una adattabilità ottimale in diversi scenarii d'applicazione.
●Installazione muntata nantu à a cunchigliaMigliora a forza strutturale è a resistenza à l'impattu, migliurendu e prestazioni di prutezzione ambientale
●Installazione senza cunchigliaDimensioni ideali di a palma di a manu, u sistema di raffreddamentu triplu garantisce un funziunamentu silenziu è stabile
●Installazione fiancu à fiancuStruttura robusta, manutenzione faciule
●Installazione ImpilataAltamente integratu, risparmiu di spaziu, adattatu per scenarii cù spazii limitati
Tutta a serie adotta un design di qualità industriale, cù una eccellente adattabilità ambientale è una scalabilità flessibile.

03.
Vantaghju principale: Empowering Precision Motion Control
I principali vantaghji di stu controller stanu in a so eccezziunalein tempu realeprestazioni è precisionesincronizazione di u tempucapacità, furnendu un supportu criticu per u cuntrollu di muvimentu d'alta precisione. Sia inrobotica mobile, automatizazione industriale, o applicazioni specializate, assicura una prestazione operativa stabile è affidabile.
Si vanta di robustezzacompatibilità elettromagnetica (EMC)ècapacità anti-interferenza, cumminatu cù una eccellente resistenza à e vibrazioni, assicurendu un funziunamentu stabile in ambienti elettromagnetichi cumplessi. U disignu mudulare permette un funziunamentu indipendente di ogni cumpunente, aumentendu significativamente l'affidabilità è a manutenibilità di u sistema.

Mentre l'industria di a robotica avanza versu una precisione più alta è una maggiore flessibilità, l'architettura di cuntrollu di u muvimentu subisce una evoluzione significativa da u processu centralizatu à a cullaburazione distribuita. U controller APQ KiWiBot, attraversu un design domesticu è una architettura collaborativa innovativa "grande è chjucu cervellu", ùn solu affronta e sfide di u cuntrollu di alta precisione, ma furnisce ancu à l'industria una basa tecnica autosufficiente è cuntrollabile, aprendu una nova strada tecnologica per a Cina in a cumpetizione glubale di l'intelligenza incarnata.
Data di publicazione: 14 di nuvembre di u 2025