
Yn erbyn cefndir y don fyd-eang o ddeallusrwydd ymgorfforol, mae perfformiad rheolwyr robotiaid wedi dod yn ffactor allweddol o ran eu lefel deallusrwydd.Cyfres KiWiBot o reolwyr robot deallus ymgorfforol gan APQyn cynnig atebion arloesol ar gyfer rheoli symudiadau manwl iawn trwy arloesoldyluniad domestig a phensaernïaeth rheoli gydweithredol "ymennydd mawr-ymennydd bach".

01.
Iteriad Technolegol: Deuol Arloesiadau mewn Cyfaint a Pherfformiad
Mae robotiaid ymgorfforedig yn gosod gofynion llym ar reolwyr, gan gynnwysmaint cryno, perfformiad uchel, integreiddio uchel, sefydlogrwydd uchel, gallu amser real uchel, a sŵn iselMae cyfres rheolyddion APQ KiWiBot, trwy dair cenhedlaeth o esblygiad technolegol, wedi mynd i'r afael yn raddol â phwyntiau poen rheolyddion traddodiadol:
Yrheolydd ail genhedlaethyn adeiladu ar bensaernïaeth X86+Orin, gan gynnig manteision felmodelau amrywiol, dewis hyblyg, graddadwyedd cryf, a maint cryno.
Yrheolydd trydydd cenhedlaethyn optimeiddio perfformiad cyffredinol ymhellach, gyda chysylltwyr yn mabwysiadudatrysiad harnais gwifrau modurol, gan wella dibynadwyedd yn sylweddol.

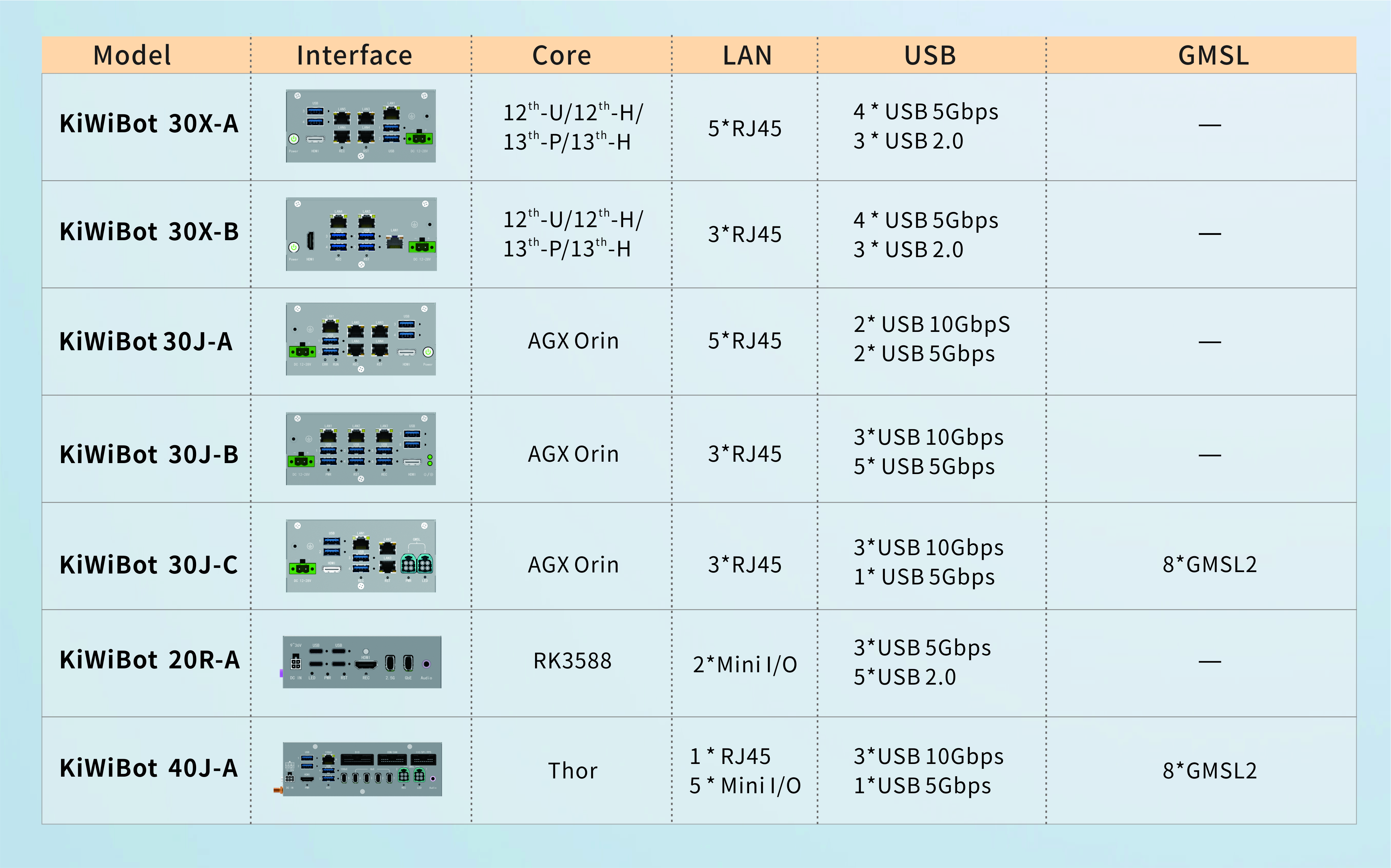
Argymhelliad Model rheolydd "Craidd y Serebelwm a'r Serebrwm"
02.
Pedwar modd gosod: hyblyg i addasu i wahanol senarios
Mae'r rheolydd yn cynnig pedwar dull gosod i sicrhau addasrwydd gorau posibl ar draws gwahanol senarios cymwysiadau.
●Gosodiad wedi'i osod ar gragenYn gwella cryfder strwythurol a gwrthiant effaith, gan wella perfformiad diogelu'r amgylchedd
●Gosodiad di-sgalDimensiynau delfrydol maint cledr, mae system oeri driphlyg yn sicrhau gweithrediad tawel a sefydlog
●Gosod ochr yn ochrStrwythur garw, cynnal a chadw hawdd
●Gosodiad Pentyredig: Integredig iawn, arbed lle, addas ar gyfer senarios cyfyngedig o ran lle
Mae'r gyfres gyfan yn mabwysiadu dyluniad gradd ddiwydiannol, sy'n cynnwys addasrwydd amgylcheddol rhagorol a graddadwyedd hyblyg.

03.
Mantais Graidd: Grymuso Rheoli Symudiadau Manwl gywir
Mae manteision craidd y rheolydd hwn yn gorwedd yn ei eithriadolamser realperfformiad a manwl gywircydamseru amsergalluoedd, gan ddarparu cefnogaeth hanfodol ar gyfer rheoli symudiadau manwl iawn. Boed ynroboteg symudol, awtomeiddio diwydiannol, neu gymwysiadau arbenigol, mae'n sicrhau perfformiad gweithredol sefydlog a dibynadwy.
Mae'n ymfalchïo mewn cadarncydnawsedd electromagnetig (EMC)agalluoedd gwrth-ymyrraeth, ynghyd â gwrthiant dirgryniad rhagorol, gan sicrhau gweithrediad sefydlog mewn amgylcheddau electromagnetig cymhleth. Mae'r dyluniad modiwlaidd yn galluogi gweithrediad annibynnol pob cydran, gan wella dibynadwyedd a chynaliadwyedd y system yn sylweddol.

Wrth i'r diwydiant roboteg symud ymlaen tuag at gywirdeb uwch a mwy o hyblygrwydd, mae pensaernïaeth rheoli symudiadau yn esblygu'n sylweddol o brosesu canolog i gydweithio dosbarthedig. Mae rheolydd APQ KiWiBot, trwy ddylunio domestig a phensaernïaeth gydweithredol arloesol "ymennydd mawr a bach", nid yn unig yn mynd i'r afael â heriau rheolaeth fanwl iawn ond hefyd yn darparu sylfaen dechnegol hunangynhaliol a rheoladwy i'r diwydiant, gan baratoi llwybr technolegol newydd i Tsieina yn y gystadleuaeth fyd-eang am ddeallusrwydd ymgorfforol.
Amser postio: Tach-14-2025