
Kontraŭ la fono de la tutmonda ondo de enkorpa inteligenteco, la agado de robotregiloj fariĝis ŝlosila determinanto de ilia inteligentecnivelo.La serio KiWiBot de enkorpigitaj inteligentaj robotregiloj de APQproponas pionirajn solvojn por altpreciza movkontrolo per novigajhejma dezajno kaj kunlabora kontrola arkitekturo de "granda cerbo-malgranda cerbo".

01.
Teknologia Iteracio: Duoblaj Sukcesoj en Volumo kaj Elfaro
Enkorpaj robotoj trudas striktajn postulojn al regiloj, inkluzive dekompakta grandeco, alta rendimento, alta integriĝo, alta stabileco, alta realtempa kapablo kaj malalta bruoLa serio de regiloj APQ KiWiBot, tra tri generacioj de teknologia evoluo, iom post iom traktis la problemojn de tradiciaj regiloj:
Laduageneracia regilobaziĝas sur la arkitekturo X86+Orin, ofertante avantaĝojn kiel ekzemplediversaj modeloj, fleksebla elekto, forta skalebleco kaj kompakta grandeco.
Latriageneracia regiloplue optimumigas la ĝeneralan rendimenton, kun konektiloj adoptantajsolvo por aŭtomobila drataro, signife plibonigante fidindecon.

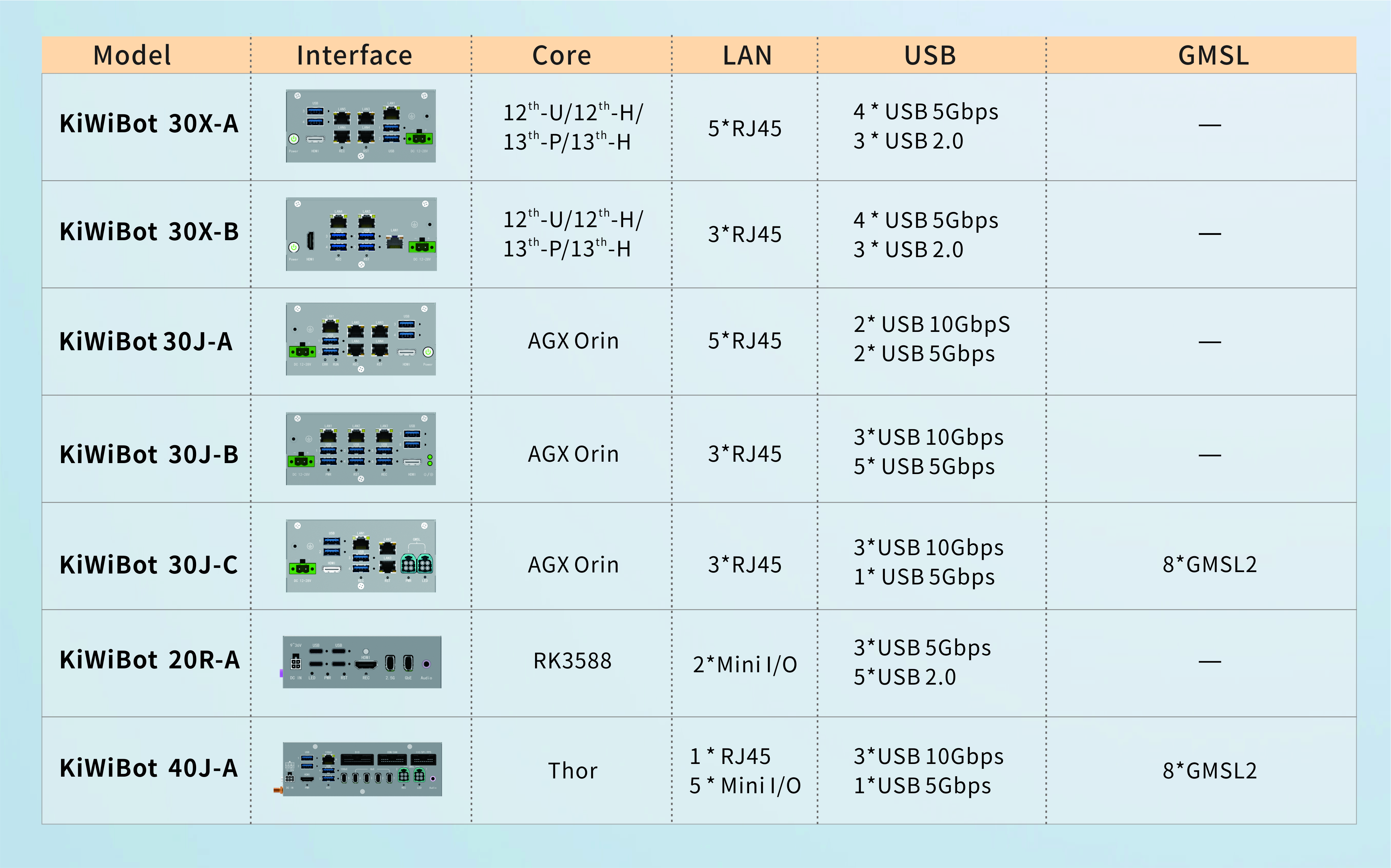
Rekomendo de la modelo por regilo "Core Cerebrum and Cerebrum"
02.
Kvar instalaĵreĝimoj: flekseblaj por adaptiĝi al diversaj scenaroj
La regilo proponas kvar instalaĵmetodojn por certigi optimuman adaptiĝemon tra diversaj aplikaĵaj scenaroj.
●Ŝel-muntita instalaĵoPlibonigas strukturan forton kaj reziston al frakoj, plibonigante mediprotektan rendimenton
●Senŝela instaladoIdealaj palmgrandaj dimensioj, triobla malvarmiga sistemo certigas trankvilan kaj stabilan funkciadon
●Flank-al-flanka instaladoFortika strukturo, facila bontenado
●Staplita InstalaĵoTre integra, spacŝpara, taŭga por spaclimigitaj scenaroj
La tuta serio adoptas industri-nivelan dezajnon, kun bonega media adaptiĝemo kaj fleksebla skaleblo.

03.
Kerna Avantaĝo: Povigi Precizan Moviĝkontrolon
La ĉefaj avantaĝoj de ĉi tiu regilo kuŝas en ĝia esceptarealtempaefikeco kaj precizatemposinkronigadokapabloj, provizante kritikan subtenon por altpreciza movkontrolo. Ĉu enmovebla robotiko, industria aŭtomatigo, aŭ specialigitaj aplikoj, ĝi certigas stabilan kaj fidindan funkciadon.
Ĝi fanfaronas pri fortikaelektromagneta kongruo (EMC)kajkontraŭ-interferaj kapabloj, kombinita kun bonega vibradrezisto, certigante stabilan funkciadon en kompleksaj elektromagnetaj medioj. La modula dezajno ebligas sendependan funkciadon de ĉiu komponanto, signife plibonigante la fidindecon kaj bonteneblecon de la sistemo.

Dum la robotika industrio progresas al pli alta precizeco kaj pli granda fleksebleco, la arkitekturo de movada kontrolo spertas signifan evoluon de centralizita prilaborado al distribuita kunlaboro. La APQ KiWiBot-regilo, per hejma dezajno kaj noviga kunlabora arkitekturo de "granda kaj malgranda cerbo", ne nur traktas la defiojn de altpreciza kontrolo, sed ankaŭ provizas al la industrio memstaran kaj kontroleblan teknikan fundamenton, pavimante novan teknologian vojon por Ĉinio en la tutmonda konkurenco pri enkorpigita inteligenteco.
Afiŝtempo: 14-Nov-2025