
En el contexto de la ola global de inteligencia encarnada, el rendimiento de los controladores de robots se ha convertido en un determinante clave de su nivel de inteligencia.La serie KiWiBot de controladores de robots inteligentes incorporados de APQofrece soluciones innovadoras para el control de movimiento de alta precisión a través de innovadoresDiseño doméstico y una arquitectura de control colaborativo de "cerebro grande-cerebro pequeño".

01.
Iteración tecnológica: avances dobles en volumen y rendimiento
Los robots encarnados imponen requisitos estrictos a los controladores, incluidosTamaño compacto, alto rendimiento, alta integración, alta estabilidad, alta capacidad en tiempo real y bajo nivel de ruido.La serie de controladores APQ KiWiBot, a través de tres generaciones de evolución tecnológica, ha abordado gradualmente los problemas de los controladores tradicionales:
Elcontrolador de segunda generaciónSe basa en la arquitectura X86+Orin y ofrece ventajas comoDiversos modelos, selección flexible, fuerte escalabilidad y tamaño compacto..
Elcontrolador de tercera generaciónOptimiza aún más el rendimiento general, con conectores que adoptan unSolución de arnés de cableado automotriz, mejorando significativamente la confiabilidad.

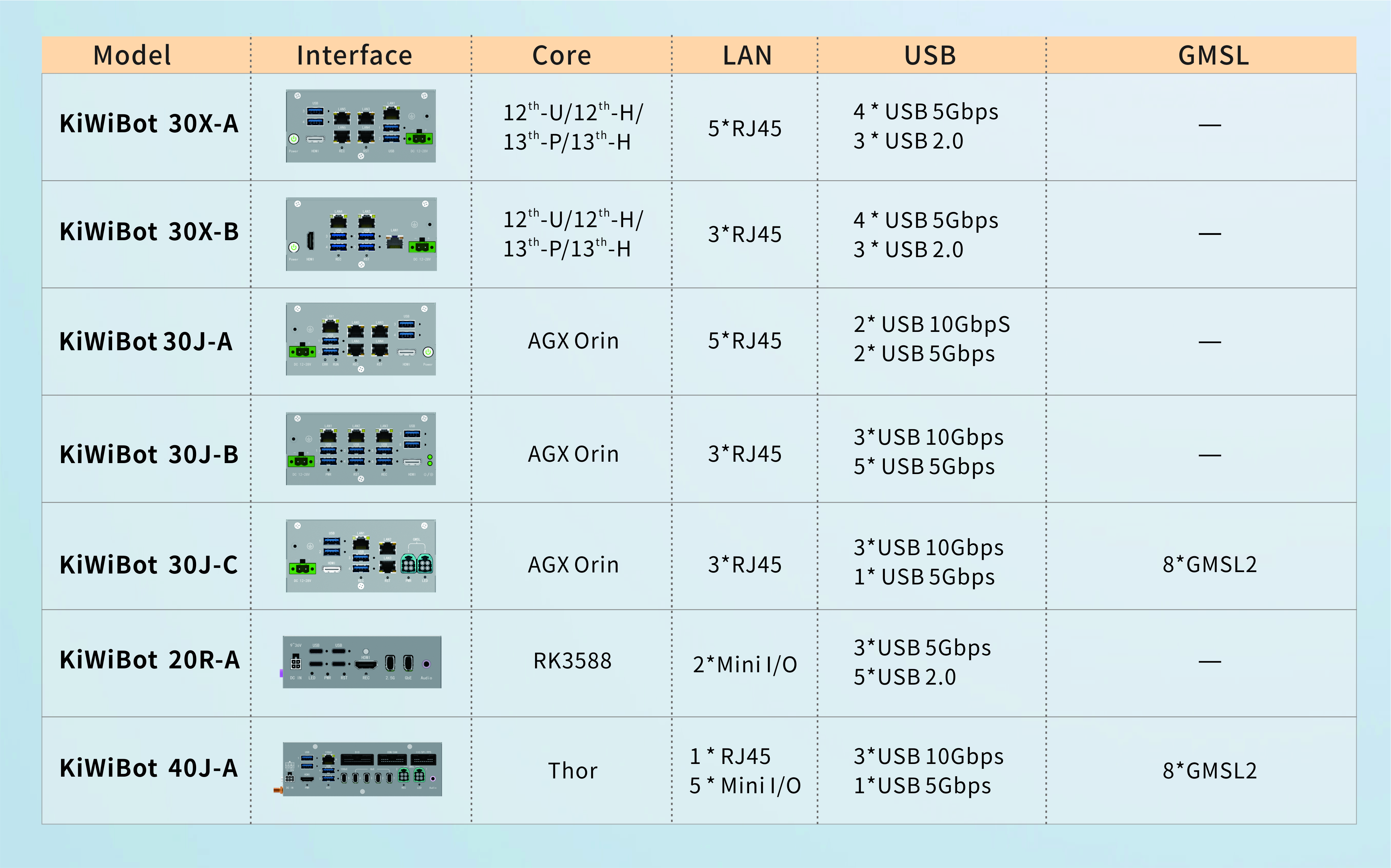
Recomendación del modelo controlador "Cerebelo central y cerebro"
02.
Cuatro modos de instalación: flexibles para adaptarse a diversos escenarios
El controlador ofrece cuatro métodos de instalación para garantizar una adaptabilidad óptima en diversos escenarios de aplicación.
●Instalación montada en la carcasa: Mejora la resistencia estructural y la resistencia al impacto, mejorando el rendimiento de protección ambiental.
●Instalación sin shell:Dimensiones ideales del tamaño de la palma de la mano, el sistema de enfriamiento triple garantiza un funcionamiento silencioso y estable.
●Instalación lado a lado:Estructura robusta, fácil mantenimiento.
●Instalación apilada:Altamente integrado, ahorra espacio, adecuado para escenarios con limitaciones de espacio.
Toda la serie adopta un diseño de grado industrial, con excelente adaptabilidad ambiental y escalabilidad flexible.

03.
Ventaja principal: Potenciar el control de movimiento de precisión
Las principales ventajas de este controlador residen en su excepcionaltiempo realRendimiento y precisiónsincronización horariacapacidades, proporcionando soporte crítico para el control de movimiento de alta precisión. Ya sea enrobótica móvil, automatización industrial o aplicaciones especializadas, garantiza un rendimiento operativo estable y confiable.
Cuenta con robustezcompatibilidad electromagnética (EMC)ycapacidades antiinterferenciasCombinado con una excelente resistencia a las vibraciones, garantiza un funcionamiento estable en entornos electromagnéticos complejos. El diseño modular permite el funcionamiento independiente de cada componente, lo que mejora significativamente la fiabilidad y el mantenimiento del sistema.

A medida que la industria robótica avanza hacia una mayor precisión y flexibilidad, la arquitectura de control de movimiento experimenta una evolución significativa, pasando del procesamiento centralizado a la colaboración distribuida. El controlador APQ KiWiBot, gracias a su diseño nacional y a su innovadora arquitectura colaborativa de "cerebros grandes y pequeños", no solo aborda los desafíos del control de alta precisión, sino que también proporciona a la industria una base técnica autosuficiente y controlable, allanando el camino tecnológico para China en la competencia global de la inteligencia incorporada.
Hora de publicación: 14 de noviembre de 2025