
Dans le contexte de la vague mondiale d'intelligence incarnée, les performances des contrôleurs de robots sont devenues un déterminant clé de leur niveau d'intelligence.La série KiWiBot de contrôleurs de robots intelligents embarqués d'APQpropose des solutions révolutionnaires pour le contrôle de mouvement de haute précision grâce à des innovationsconception domestique et architecture de contrôle collaborative « gros cerveau-petit cerveau ».

01.
Itération technologique : Double avancée majeure en termes de volume et de performance
Les robots incarnés imposent des exigences strictes aux contrôleurs, notammentTaille compacte, hautes performances, forte intégration, grande stabilité, capacité temps réel élevée et faible bruitLa gamme de contrôleurs APQ KiWiBot, à travers trois générations d'évolution technologique, a progressivement résolu les problèmes rencontrés avec les contrôleurs traditionnels :
Lecontrôleur de deuxième générationElle s'appuie sur l'architecture X86+Orin, offrant des avantages tels que :Des modèles variés, une sélection flexible, une grande évolutivité et une taille compacte.
Lecontrôleur de troisième générationoptimise davantage les performances globales, les connecteurs adoptant unsolution de faisceau de câblage automobile, améliorant considérablement la fiabilité.

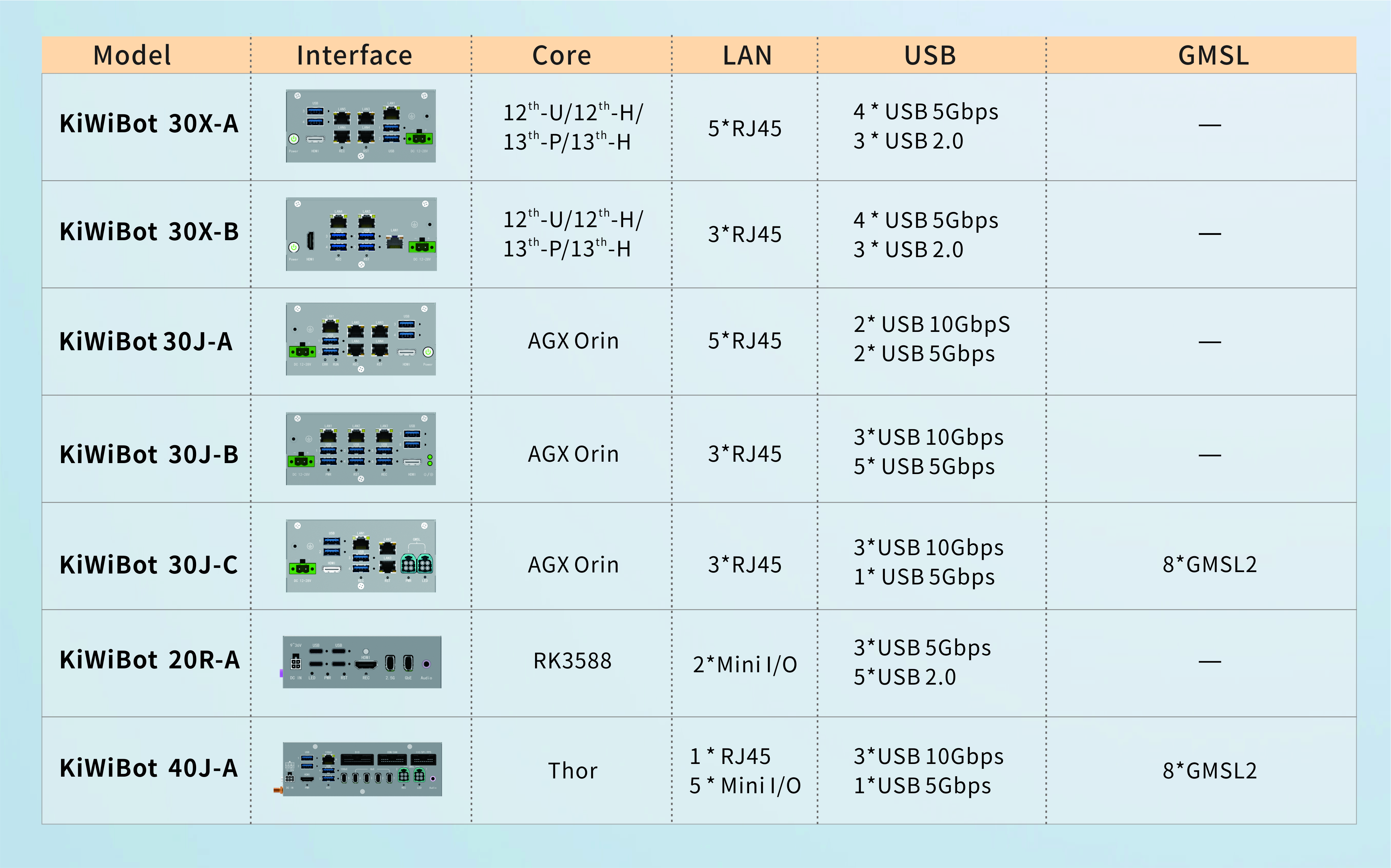
Recommandation du modèle de contrôleur « Cerebellum et Cerveau »
02.
Quatre modes d'installation : flexibles pour s'adapter à différents scénarios
Le contrôleur propose quatre méthodes d'installation pour garantir une adaptabilité optimale à différents scénarios d'application.
●Installation montée sur la coque: Améliore la résistance structurelle et la résistance aux chocs, améliorant ainsi les performances en matière de protection de l'environnement
●Installation sans coquilleDimensions idéales, de la taille de la paume de la main ; un système de refroidissement triple assure un fonctionnement silencieux et stable.
●Installation côte à côteStructure robuste, entretien facile
●Installation empiléeHautement intégré, compact, adapté aux espaces restreints
L'ensemble de la gamme adopte une conception de qualité industrielle, offrant une excellente adaptabilité environnementale et une grande flexibilité d'évolution.

03.
Avantage principal : Autonomisation du contrôle de mouvement de précision
Les principaux atouts de cette manette résident dans son caractère exceptionneltemps réelperformance et précisionsynchronisation temporellecapacités, fournissant un soutien essentiel au contrôle de mouvement de haute précision. Que ce soit dansrobotique mobile, automatisation industrielle ou applications spécialisées, elle garantit des performances opérationnelles stables et fiables.
Il se vante d'être robustecompatibilité électromagnétique (CEM)etcapacités anti-interférencesAssociée à une excellente résistance aux vibrations, elle garantit un fonctionnement stable même dans des environnements électromagnétiques complexes. Sa conception modulaire permet le fonctionnement indépendant de chaque composant, améliorant considérablement la fiabilité et la facilité de maintenance du système.

À mesure que l'industrie robotique progresse vers une précision et une flexibilité accrues, l'architecture de contrôle de mouvement connaît une évolution majeure, passant d'un traitement centralisé à une collaboration distribuée. Le contrôleur APQ KiWiBot, grâce à sa conception locale et à son architecture collaborative innovante « grand et petit cerveau », répond non seulement aux défis du contrôle de haute précision, mais fournit également à l'industrie une base technique autonome et contrôlable, ouvrant ainsi une nouvelle voie technologique pour la Chine dans la compétition mondiale en matière d'intelligence incarnée.
Date de publication : 14 novembre 2025