
I ke kua o ka nalu honua o ka naʻauao kino, ua lilo ka hana o nā mea hoʻokele robot i mea nui e hoʻoholo ai i ko lākou pae naʻauao.ʻO ka moʻo KiWiBot o nā mea hoʻokele lopako akamai i hoʻokomo ʻia mai APQhāʻawi i nā hoʻonā groundbreaking no ka kaohi neʻe kiʻekiʻe ma o nā hana houhoʻolālā kūloko a me kahi hoʻolālā kaohi hui pū "lolo nui-lolo liʻiliʻi".

01.
Hoʻololi ʻenehana: Nā holomua pālua ma ka leo a me ka hana
Hoʻokau nā robots i hoʻokomo ʻia i nā koi koʻikoʻi i nā mea hoʻokele, meka nui liʻiliʻi, ka hana kiʻekiʻe, ka hoʻohui kiʻekiʻe, ke kūpaʻa kiʻekiʻe, ka hiki ke hana manawa maoli kiʻekiʻe, a me ka walaʻau haʻahaʻaUa hoʻoponopono mālie ka moʻo APQ KiWiBot o nā mea hoʻokele, ma o ʻekolu mau hanauna o ka ulu ʻana o ka ʻenehana, i nā wahi ʻeha o nā mea hoʻokele kuʻuna:
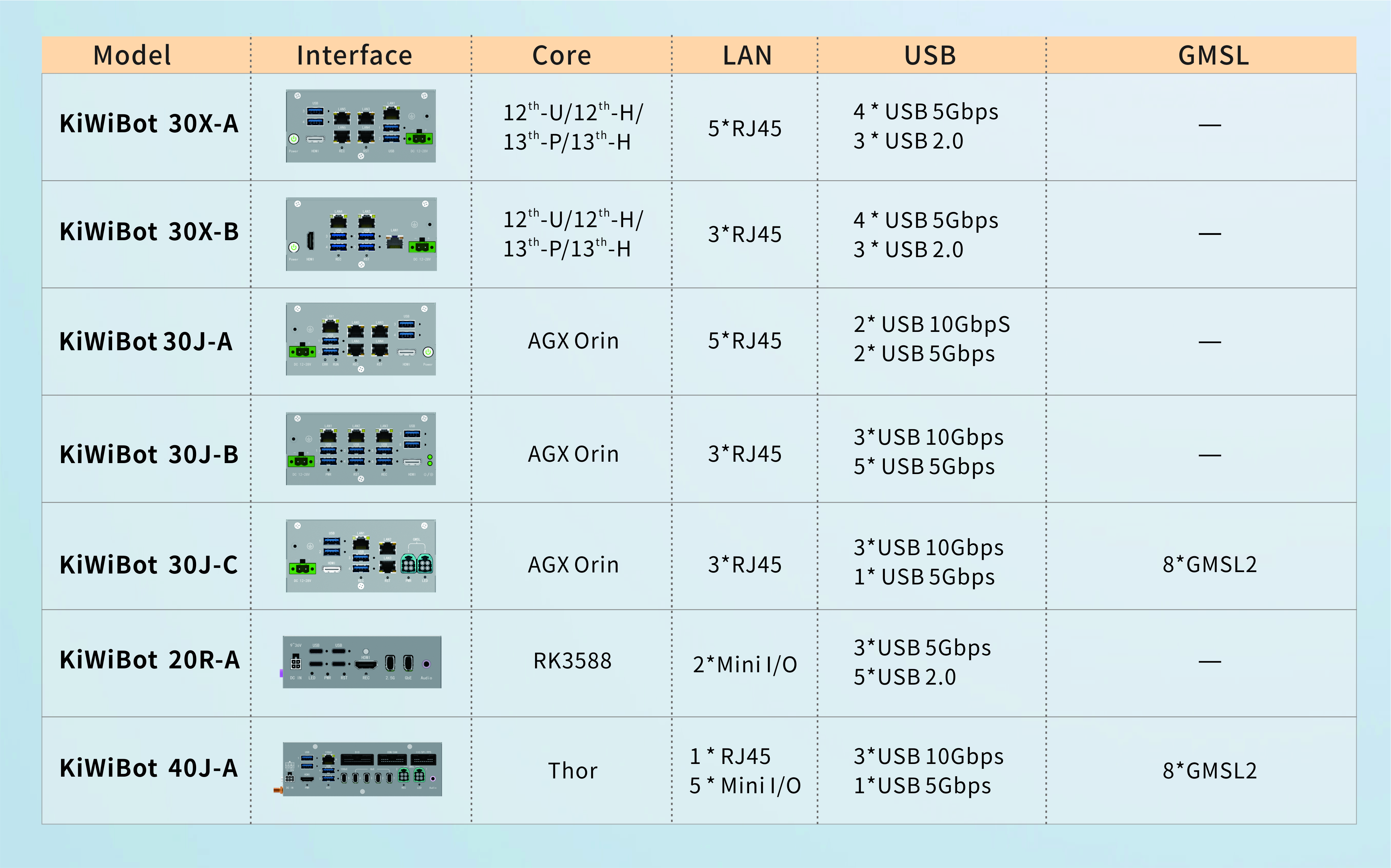
ʻO kaka mea hoʻokele hanauna luakūkulu ʻia ma luna o ke kuhikuhipuʻuone X86+Orin, e hāʻawi ana i nā pono e like menā hiʻohiʻona like ʻole, koho maʻalahi, scalability ikaika, a me ka nui compact.
ʻO kaka mea hoʻokele hanauna ʻekoluhoʻomaikaʻi hou aku i ka hana holoʻokoʻa, me nā mea hoʻohui e hoʻohana ana i kahihoʻonā uwea kaʻa, e hoʻonui nui ana i ka hilinaʻi.

Manaʻo hoʻohālike no ka mea hoʻokele "Core Cerebellum and Cerebrum"
02.
ʻEhā mau ʻano hoʻonohonoho: maʻalahi e hoʻololi i nā hiʻohiʻona like ʻole
Hāʻawi ka mea hoʻokele i ʻehā mau ʻano hoʻonohonoho e hōʻoia i ka hoʻololi kūpono ma nā ʻano hana like ʻole.
●Hoʻokomo ʻana i kau ʻia ma ka pūpū: Hoʻonui i ka ikaika o ke kūkulu ʻana a me ke kūpaʻa i ka hopena, e hoʻomaikaʻi ana i ka hana palekana o ke kaiapuni
●Hoʻokomo ʻana me ka ʻole o ka pūpūʻO nā ana kūpono e like me ka nui o ka pāma, ʻo ka ʻōnaehana hoʻoluʻu ʻekolu e hōʻoiaʻiʻo i ka hana mālie a paʻa
●Hoʻokomo ʻaoʻaoʻAno paʻa, mālama maʻalahi
●Hoʻouka ʻia ʻanaHoʻohui nui ʻia, mālama wahi, kūpono no nā hiʻohiʻona i kaupalena ʻia ka wahi
Hoʻohana ka moʻo holoʻokoʻa i kahi hoʻolālā papa ʻoihana, e hōʻike ana i ka hoʻololi maikaʻi loa ʻana i ke kaiapuni a me ka scalability hiki ke hoʻololi ʻia.

03.
Pōmaikaʻi Koʻikoʻi: Hoʻoikaika i ka Mana Neʻe Kūpono
ʻO nā pono nui o kēia mea hoʻokele aia i kona ʻano kūikawāmanawa maolika hana a me ka pololeihoʻonohonoho manawanā hiki, e hāʻawi ana i ke kākoʻo koʻikoʻi no ka kaohi neʻe kiʻekiʻe. Inā paha manā robotics kelepona, automation ʻoihana, a i ʻole nā noi kūikawā, hōʻoiaʻiʻo ia i ka hana hana paʻa a hilinaʻi hoʻi.
He ikaika kona kaenaka hoʻohālikelike electromagnetic (EMC)a menā hiki ke kū'ē i ke komohewa, i hui pū ʻia me ke kūpaʻa haʻalulu maikaʻi loa, e hōʻoiaʻiʻo ana i ka hana paʻa i nā wahi electromagnetic paʻakikī. Hiki i ka hoʻolālā modular ke hana kūʻokoʻa o kēlā me kēia ʻāpana, e hoʻonui nui ana i ka hilinaʻi o ka ʻōnaehana a me ka mālama ʻana.

I ka holomua ʻana o ka ʻoihana robotics i ka pololei kiʻekiʻe a me ka maʻalahi nui aʻe, ke hele nei ke ʻano hoʻolālā kaohi neʻe i kahi ulu nui mai ka hana kikowaena a i ka laulima puʻunaue. ʻO ka mea hoʻokele APQ KiWiBot, ma o ka hoʻolālā kūloko a me ka hoʻolālā hui pū ʻana o ka "lolo nui a liʻiliʻi", ʻaʻole wale e hoʻoponopono i nā pilikia o ka kaohi pololei kiʻekiʻe akā hāʻawi pū i ka ʻoihana me kahi kahua loea hilinaʻi ponoʻī a hiki ke hoʻomalu ʻia, e hoʻomākaukau ana i kahi ala ʻenehana hou no Kina i ka hoʻokūkū naʻauao honua.
Ka manawa hoʻouna: Nov-14-2025