
I ka ulu ʻana o ka hana ʻana o nā kaʻa i ka hana maʻalahi a akamai hoʻi, aia kahi koi wikiwiki i nā laina hana no nā hoʻonā automation me ka hoʻololi ʻana i ke kaiapuni a me ka versatility hana. Me ko lākou ʻano humanoid a me nā hiki ke neʻe, manaʻo ʻia nā robots humanoid e hana i nā hana e like me ka nānā ʻana i ke kelepona a me ka ʻākoakoa maikaʻi—nā hana a nā robots ʻoihana kuʻuna e hakakā nei e lawelawe i nā wahi ʻākoakoa hope loa. ʻO kēia ka mea e lilo ai lākou i kuhikuhi koʻikoʻi i ka hoʻonui ʻana i ka maʻalahi a me ka pono o ka laina hana.

I kēia kūlana, ua hoʻolauna ʻo APQ i ka hopena lolo-lua kumu KiWiBot30, e hoʻoikaika ana i nā robots humanoid me ka hiki ke hoʻokō i nā hana kikoʻī kiʻekiʻe i nā hiʻohiʻona hōʻuluʻulu hope loa o ke kaʻa. Kākoʻo kēia hopena i nā ʻōnaehana ʻike e hoʻokō ana i ka pololei o ka ʻike ʻana i nā hemahema weld seam pae millimeter. I ka manawa like, ma o ka mana i hoʻonohonoho ʻia me nā axis multi-axis, hiki iā ia ke hopu pololei i nā ʻāpana a me ke kau ʻana. Ke hoʻohālikelike ʻia me nā robots ʻoihana kuʻuna i kaupalena ʻia i nā kikowaena paʻa a me nā papahana i hoʻonohonoho mua ʻia, hōʻike nā ʻōnaehana i lako me ka lolo-lua kumu KiWiBot30 i ka hiki ke nānā pono ʻia ke kelepona a me ka hōʻuluʻulu maʻalahi, e hāʻawi ana i kahi ala ʻenehana hou e hoʻoponopono ai i nā pilikia o ka hana akamai i ka wā e hiki mai ana.
Nā kiko ʻeha ma ka laina hana: ʻAʻole hiki ke hele i ka Chasm Traditional Automation
I ka hana ʻana i nā mea kiʻekiʻe, ua lilo ka nānā ʻana i ka maikaʻi a me ka ʻākoakoa maʻalahi i mau pilikia koʻikoʻi i ka hoʻonui ʻana i ka ʻoihana. Ma ka lawe ʻana i ka hana ʻana i nā kaʻa ma ke ʻano he laʻana, pono ka nānā ʻana i ka weld kino i ka ʻike ʻana i nā hemahema micron-level, a pono ka ʻākoakoa ʻana o nā ʻāpana kikoʻī i ka mana i hoʻonohonoho ʻia me nā axis he nui. Ke kū nei nā lako kuʻuna i ʻekolu mau pilikia nui:
-
Ka lohi o ka pane ʻana:Loaʻa i ka ʻike maka a me ka hoʻokō ʻana i ka neʻe ʻana he mau lohi ma ke ʻano o nā haneli milliseconds, e hōʻemi ana i ka pono o nā laina hana wikiwiki.
-
Mana Kamepiula i Hoʻokaʻawale ʻia:Ua hoʻokaʻawale ʻia ka ʻike, ka hoʻoholo ʻana, a me ka kaohi neʻe ʻana, me nā hiki kūpono ʻole no ka hana ʻana i ka ʻikepili multimodal.
-
Nā Palena Wahi:He palena loa ka wahi hoʻonohonoho o ke kino robot, e paʻakikī ai ka hoʻokipa ʻana i nā mea hoʻokele maʻamau.
Hoʻoikaika kēia mau mea ʻeha i nā ʻoihana e mōhai i ka pono ma o ka hoʻohui ʻana i nā kikowaena manual a i ʻole e hoʻopukapuka kālā miliona i ka hoʻomaikaʻi piha ʻana i nā laina hana. ʻO ka hoʻolaha ʻana o nā robots akamai i hoʻokomo ʻia me nā mea hoʻokele koʻikoʻi o ka hanauna hou ma nā laina hana e hāʻawi i ka ʻōlelo hoʻohiki o ka uhaki ʻana i kēia pilikia.

Hana Pū ʻana o ka Lolo ʻElua: Ke Kī i ka Pane Pae Milisekone
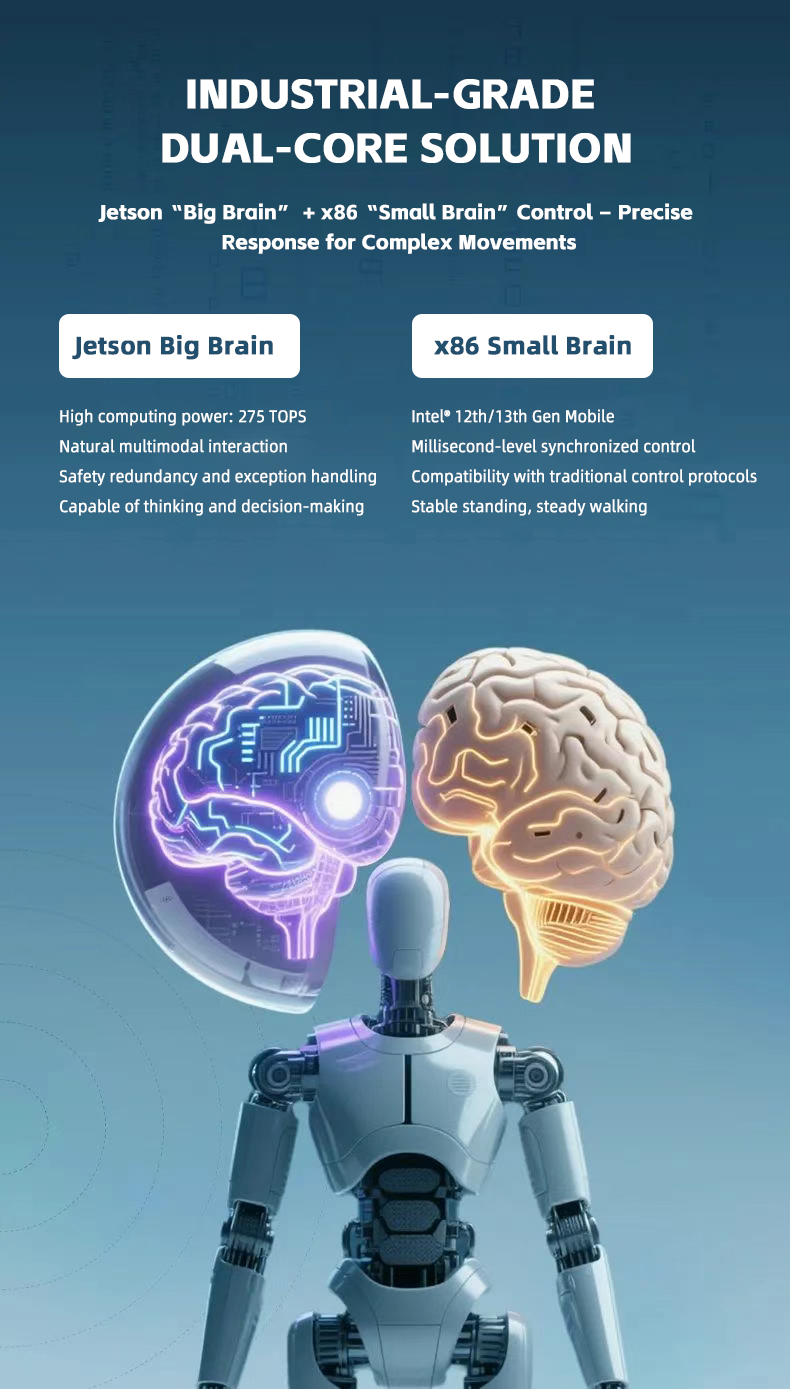
I ka hapa mua o 2025, ua ʻike pinepine ʻia nā huahana moʻo KiWiBot a Apuqi ma nā hōʻikeʻike robotics nui. Hoʻohana kēia mea hana e like me ka nui o ka pālima i kahi hoʻolālā lolo pālua hou:
-
ʻO ka lolo ʻike ʻo Jetson:Hāʻawi i 275 TOPS o ka mana helu, hiki ke hana i ʻehā mau kahawai o nā kahawai ʻike kiʻekiʻe-wehewehe i ka manawa maoli, e kākoʻo ana i ka nānā wikiwiki ʻana i nā hemahema weld ma nā laina kaʻa.
-
x86 Neʻe ʻana o ka lolo:Hoʻomaopopo i ka mana i hoʻonohonoho ʻia o ka multi-axis, e hōʻemi ana i ka jitter kauoha i ka pae microsecond, e hoʻomaikaʻi pono ana i ka pono a me ka pololei o ka ʻākoakoa.
Hoʻopili ʻia nā lolo ʻelua ma o nā kahawai wikiwiki e kūkulu i kahi ʻōnaehana "ʻike-hoʻoholo-hoʻokō" pani ʻia. Ke ʻike ka ʻōnaehana ʻike i kahi ʻokoʻa hui, hiki i ka ʻōnaehana neʻe ke hana koke i nā hoʻoponopono uku, e hoʻokō maoli ana i ka hoʻonohonoho "maka-a-lima".
Hōʻoia Koʻikoʻi: Hoʻokumu ʻia ka hilinaʻi pae ʻoihana ma o ka hoʻāʻo hou ʻana
Ma o ka hoʻāʻo nui ʻana, ua hoʻokokoke ka hana a KiWiBot30 i nā kūlana quasi-automotive-grade, e hōʻike ana i ke kūpaʻa a me ke kūpaʻa kupaianaha:
1. Ua uhi ʻia ka motherboard me kahi papa pale ʻekolu-hōʻoia e pale aku i ka pala o ka noe aila.
2. Hoʻemi ka ʻōnaehana hoʻoluʻu i hoʻokomo ʻia i ka leo ma ka 40% me ka mālama ʻana i ka hana like.
3. Uhi ka hoʻāʻo ʻana i nā kūlana koʻikoʻi e like me nā loli ākea o ka mahana, ka haʻalulu, a me ka haʻalulu.
I ke alo ʻana i ka nalu o ka hana ʻana i nā kaʻa e neʻe ana i ka maʻalahi a me ka naʻauao kiʻekiʻe, ua maopopo loa iā Apuqi ka misionari koʻikoʻi e hali ʻia e nā ʻōnaehana mana koʻikoʻi o nā robots akamai i hoʻokomo ʻia.

Ma ke ʻano he mea hoʻolako i hoʻolaʻa ʻia no nā lako paʻa a me nā polokalamu no ka "core dual-brain" o nā robots akamai i hoʻokomo ʻia, ua pili mau ʻo Apuqi i ka moʻomeheu ʻoihana o "Hilinaʻi, a No laila Hilinaʻi." Ke hoʻomau nei mākou i ka hoʻomohala ʻana i ke kahua o ka naʻauao i hoʻokomo ʻia, e kālele ana i ka hoʻomohala ʻana i nā kahua lako paʻa a hilinaʻi hoʻi a me nā ʻōnaehana polokalamu kūpono a hui pū. ʻO kā mākou kūpaʻa e hāʻawi i kā mākou mea kūʻai aku me nā hoʻonā piha piha e uhi ana i nā mea āpau mai ka mana koʻikoʻi a hiki i ka hoʻohui ʻōnaehana, i hoʻopiha ʻia e nā lawelawe premium ʻoihana a maikaʻi. Me kā mākou mau hoa, ke hoʻoikaika nei mākou e hoʻokele i ka hana hou a me ka hoʻohana ʻana i nā robots humanoid i ka hana kaʻa a me nā noi ʻoihana ākea. Me kahi kahua ʻenehana hilinaʻi, hoʻoikaika mākou i ka wā e hiki mai ana o ka hana akamai.
Inā makemake ʻoe i kā mākou hui a me nā huahana, e ʻoluʻolu e hoʻokaʻaʻike aku i kā mākou ʻelele ma waho, ʻo Robin.
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
Ka manawa hoʻouna: Iulai-03-2025