
Vim muaj kev txawj ntse thoob ntiaj teb, kev ua tau zoo ntawm cov neeg tswj hwm neeg hlau tau dhau los ua qhov tseem ceeb ntawm lawv qib kev txawj ntse.Cov KiWiBot series ntawm cov neeg hlau ntse uas muaj lub cev los ntawm APQmuab cov kev daws teeb meem tshiab rau kev tswj hwm kev txav mus los siab los ntawm kev tsim kho tshiabKev tsim qauv hauv tsev thiab kev sib koom tes tswj hwm "lub hlwb loj-lub hlwb me".

01.
Kev Siv Tshuab Tshiab: Ob Txoj Kev Ua Tau Zoo Hauv Qhov Ntim Thiab Kev Ua Tau Zoo
Cov neeg hlau uas muaj lub cev ua rau muaj kev cai nruj rau cov neeg tswj hwm, suav nrogcompact loj, kev ua haujlwm siab, kev sib koom ua ke siab, kev ruaj khov siab, muaj peev xwm ua haujlwm tiag tiag, thiab suab nrov tsawgCov APQ KiWiBot series ntawm cov maub los, los ntawm peb tiam neeg ntawm kev hloov pauv thev naus laus zis, tau maj mam daws cov teeb meem mob ntawm cov maub los ib txwm muaj:
Lubtus maub los tswj hwm tiam thib obtsim los ntawm X86 + Orin architecture, muab cov txiaj ntsig xws lintau hom qauv, kev xaiv yooj ywm, muaj zog scalability, thiab compact loj.
Lubtus maub los tswj hwm tiam thib pebntxiv optimizes tag nrho kev ua tau zoo, nrog rau cov connectors txais yuav ib qhokev daws teeb meem ntawm cov xov hlau hauv tsheb, ua kom muaj kev ntseeg siab ntau ntxiv.

"Core Cerebellum thiab Cerebrum" tus qauv tswj kev pom zoo
02.
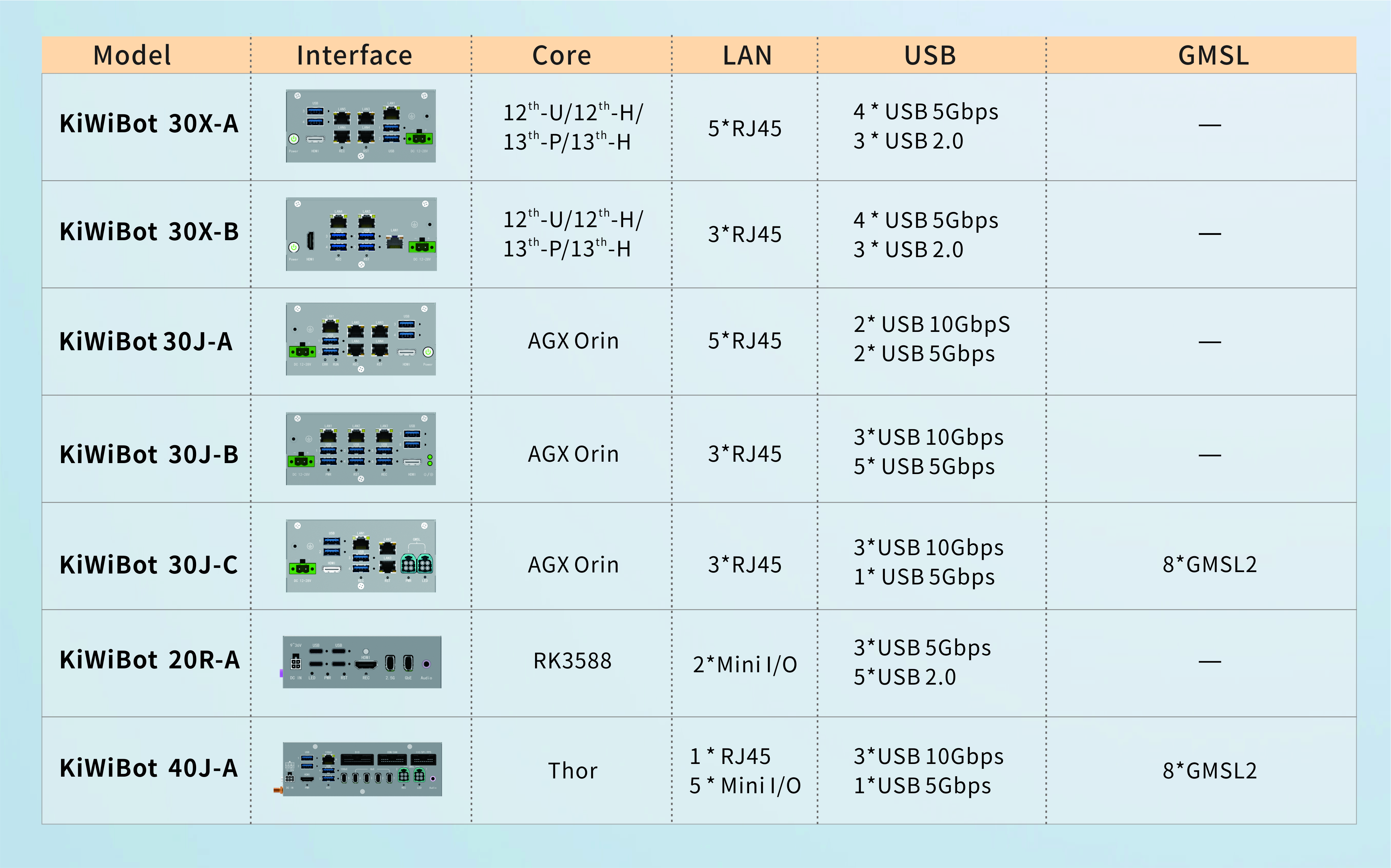
Plaub hom kev teeb tsa: yoog tau los hloov kho rau ntau yam xwm txheej
Tus maub los muaj plaub txoj kev teeb tsa kom ntseeg tau tias muaj kev hloov pauv zoo tshaj plaws thoob plaws ntau yam xwm txheej ntawm daim ntawv thov.
●Kev teeb tsa ntawm lub plhaub: Txhim kho lub zog ntawm cov qauv thiab kev tiv thaiv kev cuam tshuam, txhim kho kev ua tau zoo ntawm kev tiv thaiv ib puag ncig
●Kev teeb tsa tsis muaj plhaub: Qhov loj me zoo tagnrho rau xib teg, peb lub tshuab cua txias ua kom muaj kev ua haujlwm ntsiag to thiab ruaj khov
●Kev teeb tsa ib sab: Cov qauv ruaj khov, yooj yim txij nkawm
●Kev Teeb tsa Stacked: Kev sib xyaw ua ke zoo heev, txuag qhov chaw, tsim nyog rau cov xwm txheej uas tsis muaj chaw ntau
Tag nrho cov koob no siv tus qauv tsim qib kev lag luam, uas muaj kev hloov pauv zoo heev rau ib puag ncig thiab kev hloov pauv tau yooj yim.

03.
Qhov Zoo Tshaj Plaws: Txhawb Kev Tswj Xyuas Kev Txav Mus Los Kom Tseeb
Cov txiaj ntsig tseem ceeb ntawm cov maub los no yog nws qhov tshwj xeeblub sijhawm tiag tiagkev ua tau zoo thiab meejlub sijhawm sib dhosmuaj peev xwm, muab kev txhawb nqa tseem ceeb rau kev tswj hwm kev txav mus los siab. Txawm nyob hauvcov neeg hlau txawb, kev siv tshuab ua lag luam, lossis cov ntawv thov tshwj xeeb, nws ua kom ruaj khov thiab txhim khu kev qha kev ua haujlwm.
Nws khav txog lub zog ruaj khovKev sib raug zoo ntawm hluav taws xob (EMC)thiabkev tiv thaiv kev cuam tshuam, ua ke nrog kev tiv thaiv kev co zoo heev, ua kom muaj kev ua haujlwm ruaj khov hauv cov chaw muaj hluav taws xob nyuaj. Tus qauv tsim modular ua rau txhua qhov khoom ua haujlwm ywj pheej, ua rau lub kaw lus ntseeg tau thiab tswj tau zoo dua.

Raws li kev lag luam robotics nce qib mus rau qhov tseeb dua thiab muaj kev ywj pheej ntau dua, cov qauv tswj kev txav mus los tab tom hloov pauv tseem ceeb los ntawm kev ua haujlwm hauv nruab nrab mus rau kev sib koom tes faib tawm. Lub APQ KiWiBot maub los, los ntawm kev tsim qauv hauv tsev thiab kev tsim kho tshiab "lub hlwb loj thiab me" kev sib koom tes, tsis yog tsuas yog daws cov teeb meem ntawm kev tswj hwm siab xwb tab sis kuj muab kev lag luam nrog lub hauv paus kev txawj ntse thiab tswj tau, paving txoj hauv kev tshiab rau Tuam Tshoj hauv kev sib tw txawj ntse thoob ntiaj teb.
Lub sijhawm tshaj tawm: Kaum Ib Hlis-14-2025