
Virum Hannergrond vun der globaler Well vun der verkierperter Intelligenz ass d'Leeschtung vu Robotercontroller zu engem Schlësselfaktor fir hiren Intelligenzniveau ginn.D'KiWiBot Serie vun verkierperten intelligenten Robotercontroller vun APQbitt banebriechend Léisunge fir héichpräzis Bewegungssteierung duerch innovativHausdesign an eng kollaborativ Kontrollarchitektur vum Typ "grouss-gehir-kleng-gehir".

01.
Technologesch Iteratioun: Duebel Duerchbréch a Volumen a Leeschtung
Verkierperte Roboter stellen streng Ufuerderungen un d'Controller, dorënnerkompakt Gréisst, héich Leeschtung, héich Integratioun, héich Stabilitéit, héich Echtzäitfäegkeet a geréng GeräischerD'APQ KiWiBot Serie vu Controller huet duerch dräi Generatioune vun technologescher Evolutioun d'Schwachpunkte vun traditionelle Controller lues a lues adresséiert:
DenController vun der zweeter Generatiounbaut op der X86+Orin Architektur op a bitt Virdeeler wéidivers Modeller, flexibel Auswiel, staark Skalierbarkeet a kompakt Gréisst.
DenController vun der drëtter Generatiounoptimiséiert d'Gesamtleistung weider, mat Stecker déi enLéisung fir Kabelbam am Automobilberäich, wat d'Zouverlässegkeet däitlech erhéicht.

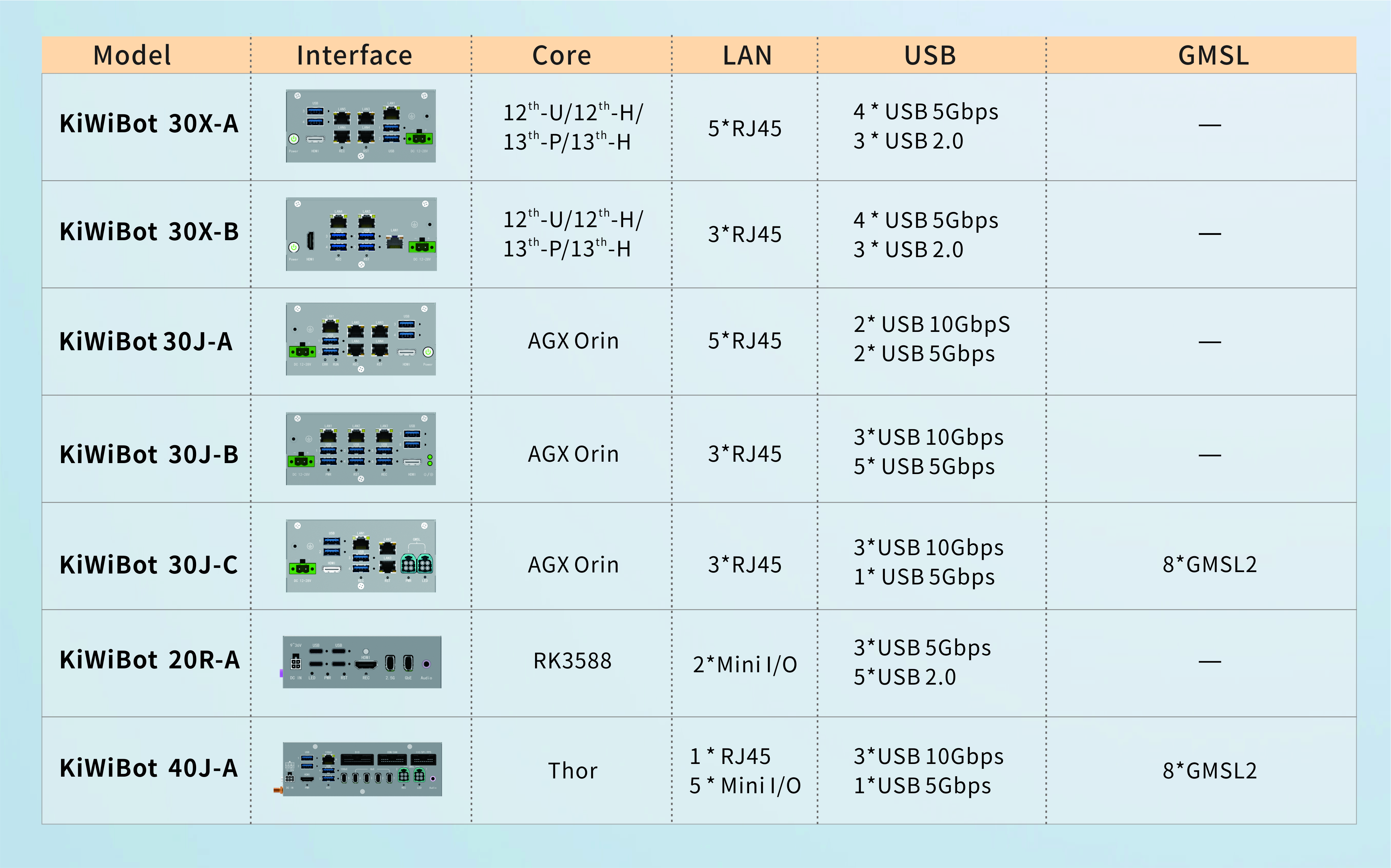
Empfehlung fir de Modell vum Controller "Core Cerebellum and Cerebrum"
02.
Véier Installatiounsmodi: flexibel fir sech un ënnerschiddlech Szenarien unzepassen
De Controller bitt véier Installatiounsmethoden fir eng optimal Adaptabilitéit a verschiddenen Applikatiounsszenarien ze garantéieren.
●Installatioun op SchuelVerbessert d'strukturell Stäerkt an d'Schlagfestigkeit, verbessert d'Ëmweltschutzleistung
●Schuelfräi InstallatiounIdeal Handflächgréisst, dräifach Ofkillungssystem garantéiert rouegen a stabile Betrib
●Säit-un-Säit-InstallatiounRobust Struktur, einfach Ënnerhalt
●Gestapelte InstallatiounHéich integréiert, platzspuerend, gëeegent fir Plazbeschränkte Szenarien
Déi ganz Serie benotzt en industriellt Design, mat exzellenter Ëmweltadaptatioun a flexibeler Skalierbarkeet.

03.
Kärvirdeel: Stäerkung vun der präziser Bewegungskontroll
Déi wichtegst Virdeeler vun dësem Controller leien an senger aussergewéinlecherEchtzäitLeeschtung a präzisZäitsynchroniséierungFäegkeeten, déi kritesch Ënnerstëtzung fir héichpräzis Bewegungskontroll ubidden. Egal ob anmobil Robotik, industriell Automatiséierung oder spezialiséiert Uwendungen, et garantéiert eng stabil a verlässlech operationell Leeschtung.
Et weist robustelektromagnetesch Kompatibilitéit (EMC)anAnti-Interferenzfäegkeeten, kombinéiert mat exzellenter Schwéngungsbeständegkeet, garantéiert dat e stabile Betrib a komplexen elektromagneteschen Ëmfeld. Den modulare Design erméiglecht den onofhängege Fonctionnement vun all Komponent, wat d'Zouverlässegkeet an d'Maintenance vum System däitlech verbessert.

Well d'Robotikindustrie sech op méi héich Präzisioun a méi Flexibilitéit virukënnt, mécht d'Architektur vun der Bewegungskontroll eng bedeitend Evolutioun vun der zentraliséierter Veraarbechtung zur verdeelter Zesummenaarbecht duerch. Den APQ KiWiBot Controller, duerch säin nationalen Design an seng innovativ kollaborativ Architektur "Big and Small Brain", adresséiert net nëmmen d'Erausfuerderunge vun der héichpräziser Kontroll, mä bitt der Industrie och eng selbstänneg a kontrolléierbar technesch Basis, wat China en neien technologesche Wee am globale Konkurrenzberäich vun der verkierperter Intelligenz fräimaacht.
Zäitpunkt vun der Verëffentlechung: 14. November 2025