
Pasaulinės įkūnyto intelekto bangos fone robotų valdiklių našumas tapo pagrindiniu jų intelekto lygio veiksniu.„APQ“ įkūnytų intelektualių robotų valdiklių „KiWiBot“ serijasiūlo novatoriškus sprendimus didelio tikslumo judesio valdymui, pasitelkiantvidaus dizainas ir „didelių smegenų-mažų smegenų“ bendradarbiavimo valdymo architektūra.

01.
Technologinė iteracija: dvigubi proveržiai apimties ir našumo srityse
Įkūnyti robotai kelia griežtus reikalavimus valdikliams, įskaitantkompaktiškas dydis, didelis našumas, didelė integracija, didelis stabilumas, didelės realiojo laiko galimybės ir mažas triukšmas„APQ KiWiBot“ valdiklių serija, per tris technologinės evoliucijos kartas, palaipsniui sprendė tradicinių valdiklių problemas:
Theantros kartos valdiklisremiasi X86+Orin architektūra ir siūlo tokius privalumus kaipįvairūs modeliai, lankstus pasirinkimas, didelis mastelio keitimas ir kompaktiškas dydis.
Thetrečios kartos valdiklisdar labiau optimizuoja bendrą našumą, jungtys pritaikomosautomobilių laidų jungčių sprendimas, žymiai padidinant patikimumą.

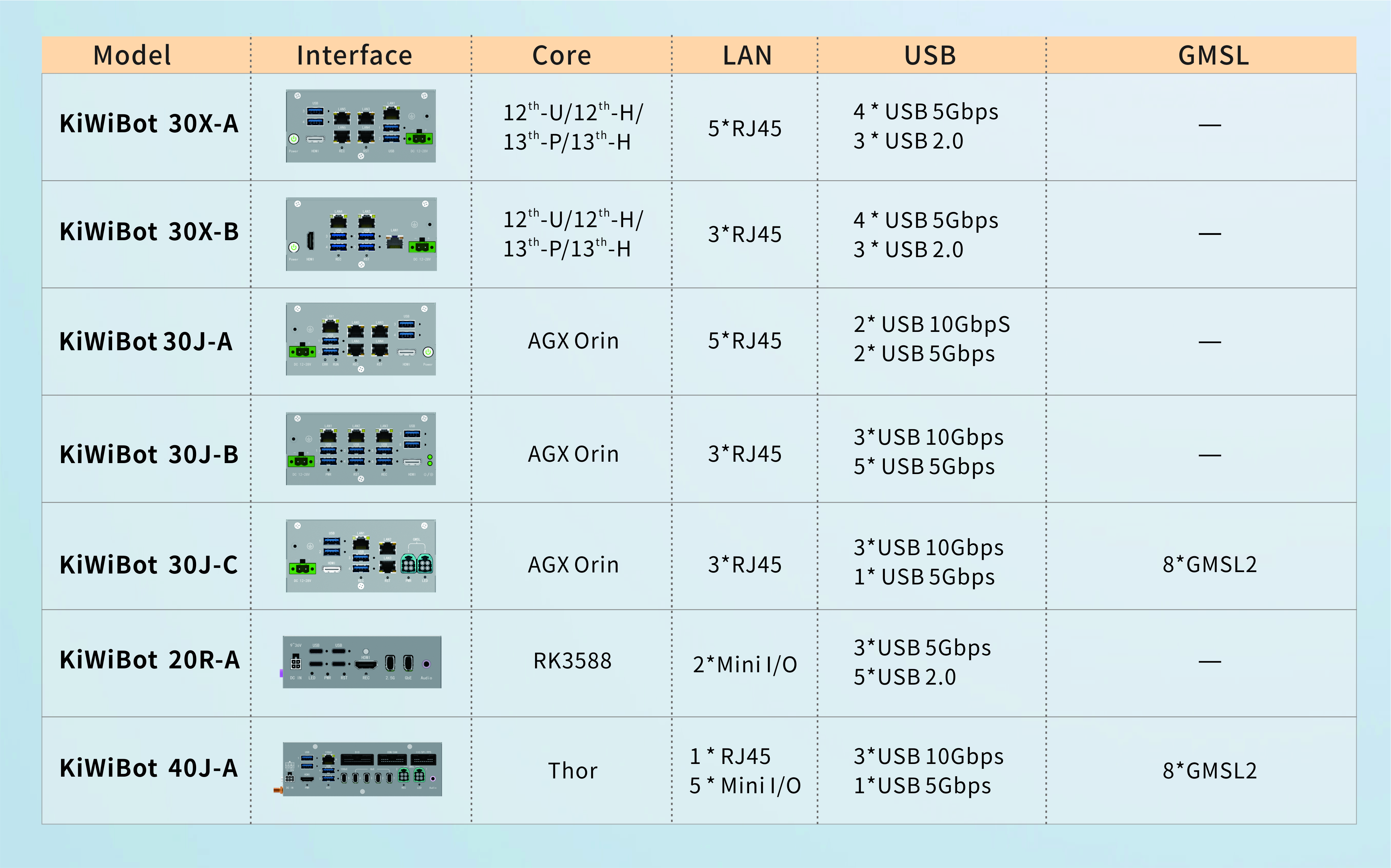
„Pagrindinių smegenėlių ir didžiųjų smegenų“ valdiklio modelio rekomendacija
02.
Keturi diegimo režimai: lankstūs ir pritaikomi įvairiems scenarijams
Valdiklis siūlo keturis diegimo būdus, kad būtų užtikrintas optimalus pritaikymas įvairiems taikymo scenarijams.
●Montavimas ant korpusoPadidina konstrukcijos stiprumą ir atsparumą smūgiams, gerindamas aplinkos apsaugos veiksmingumą
●Montavimas be apvalkaloIdealūs delno dydžio matmenys, triguba aušinimo sistema užtikrina tylų ir stabilų veikimą
●Montavimas gretaTvirta konstrukcija, lengva priežiūra
●Sluoksniuotas diegimasLabai integruotas, taupantis vietą, tinka ribotos erdvės scenarijams
Visa serija yra pritaikyta pramoniniam dizainui, pasižyminčiam puikiu prisitaikymu prie aplinkos sąlygų ir lanksčiu mastelio keitimu.

03.
Pagrindinis privalumas: Tikslus judesio valdymas
Pagrindiniai šio valdiklio privalumai yra išskirtinisrealiuoju laikunašumas ir tikslumaslaiko sinchronizavimasgalimybės, teikiančios kritinę paramą didelio tikslumo judesio valdymui. Nesvarbu, armobilioji robotika, pramoninė automatizacija arba specializuotos programos, tai užtikrina stabilų ir patikimą veikimą.
Jis pasižymi tvirtumuelektromagnetinis suderinamumas (EMS)irapsaugos nuo trukdžių galimybės, kartu su puikiu atsparumu vibracijai, užtikrina stabilų veikimą sudėtingoje elektromagnetinėje aplinkoje. Modulinė konstrukcija leidžia kiekvienam komponentui veikti nepriklausomai, o tai žymiai padidina sistemos patikimumą ir priežiūrą.

Robotų pramonei siekiant didesnio tikslumo ir lankstumo, judesio valdymo architektūra išgyvena reikšmingą evoliuciją nuo centralizuoto apdorojimo iki paskirstyto bendradarbiavimo. APQ KiWiBot valdiklis, sukurtas naudojant vietinį dizainą ir novatorišką „didelių ir mažų smegenų“ bendradarbiavimo architektūrą, ne tik išsprendžia didelio tikslumo valdymo iššūkius, bet ir suteikia pramonei savarankišką ir valdomą techninį pagrindą, nutiesdamas Kinijai naują technologinį kelią pasaulinėje įkūnyto intelekto konkurencijoje.
Įrašo laikas: 2025 m. lapkričio 14 d.