
Fl-isfond tal-mewġa globali tal-intelliġenza inkorporata, il-prestazzjoni tal-kontrolluri tar-robots saret determinanti ewlieni tal-livell ta' intelliġenza tagħhom.Is-serje KiWiBot ta' kontrolluri tar-robot intelliġenti inkorporati minn APQjoffri soluzzjonijiet innovattivi għal kontroll tal-moviment ta' preċiżjoni għolja permezz ta' innovazzjonijietdisinn domestiku u arkitettura ta' kontroll kollaborattiv ta' "moħħ kbir-moħħ żgħir".

01.
Iterazzjoni Teknoloġika: Avvanzi Doppji fil-Volum u l-Prestazzjoni
Robots inkorporati jimponu rekwiżiti stretti fuq il-kontrolluri, inklużdaqs kompatt, prestazzjoni għolja, integrazzjoni għolja, stabbiltà għolja, kapaċità għolja f'ħin reali, u storbju baxxIs-serje ta' kontrolluri APQ KiWiBot, permezz ta' tliet ġenerazzjonijiet ta' evoluzzjoni teknoloġika, indirizzat gradwalment il-punti problematiċi tal-kontrolluri tradizzjonali:
Il-kontrollur tat-tieni ġenerazzjonitibni fuq l-arkitettura X86+Orin, u toffri vantaġġi bħalmudelli diversi, għażla flessibbli, skalabbiltà qawwija, u daqs kompatt.
Il-kontrollur tat-tielet ġenerazzjonijottimizza aktar il-prestazzjoni ġenerali, bil-konnetturi jadottawsoluzzjoni tal-wajers tal-karozzi, u ttejjeb b'mod sinifikanti l-affidabbiltà.

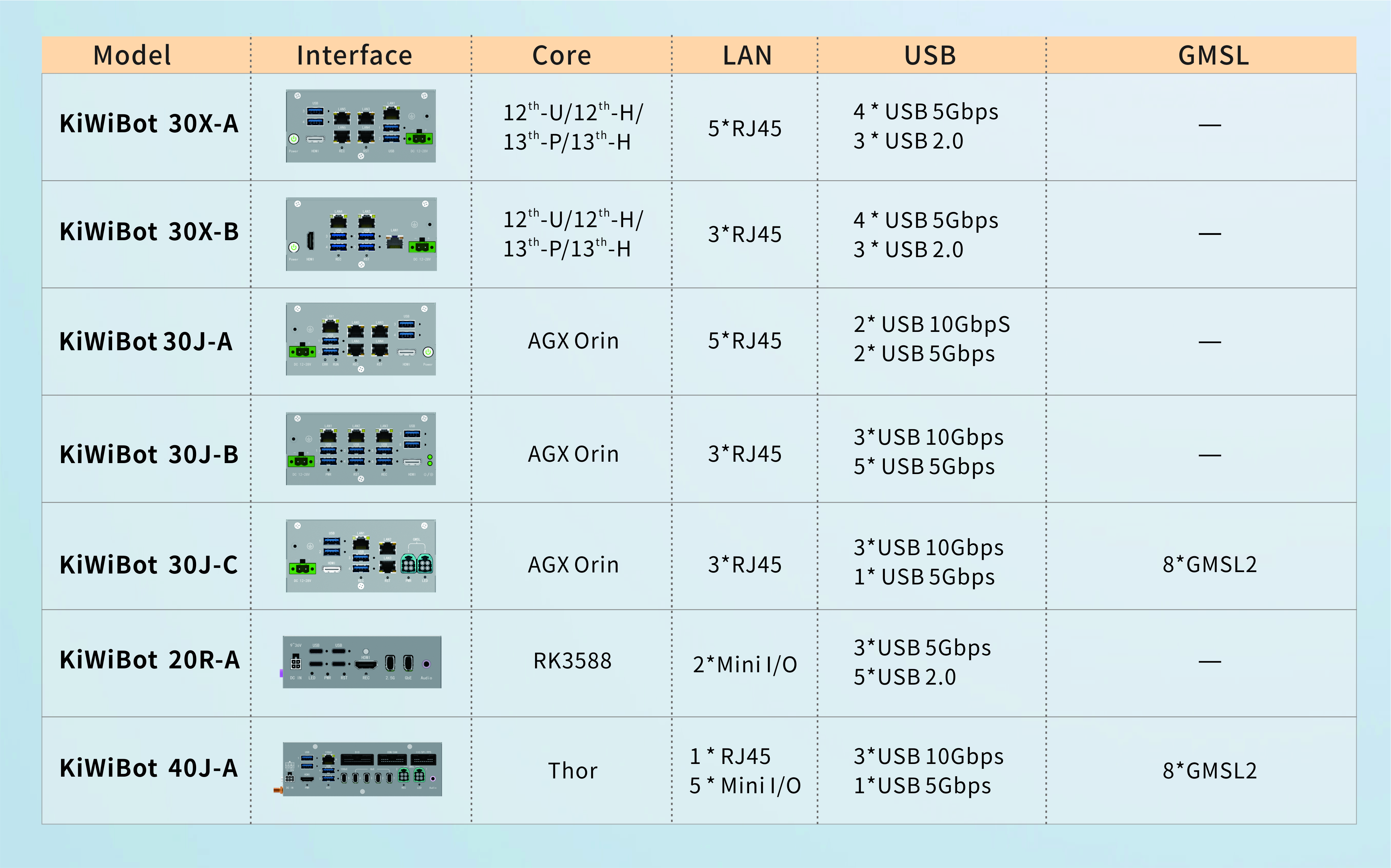
Rakkomandazzjoni tal-Mudell tal-kontrollur "Core Cerebellum and Cerebrum"
02.
Erba' modi ta' installazzjoni: flessibbli biex jadattaw għal diversi xenarji
Il-kontrollur joffri erba' metodi ta' installazzjoni biex jiżgura adattabilità ottimali f'diversi xenarji ta' applikazzjoni.
●Installazzjoni mmuntata fuq il-qoxraIttejjeb is-saħħa strutturali u r-reżistenza għall-impatt, u b'hekk ittejjeb il-prestazzjoni tal-protezzjoni ambjentali
●Installazzjoni mingħajr qoxraDimensjonijiet ideali daqs il-pala ta' id, sistema ta' tkessiħ tripla tiżgura tħaddim kwiet u stabbli
●Installazzjoni ħdejn xulxinStruttura robusta, manutenzjoni faċli
●Installazzjoni f'MunzelliIntegrat ħafna, jiffranka l-ispazju, adattat għal xenarji bi spazju limitat
Is-serje kollha tadotta disinn ta' grad industrijali, li jinkludi adattabilità ambjentali eċċellenti u skalabbiltà flessibbli.

03.
Vantaġġ Ewlieni: Nagħtu s-Setgħa lill-Kontroll tal-Mozzjoni ta' Preċiżjoni
Il-vantaġġi ewlenin ta' dan il-kontrollur jinsabu fl-eċċezzjonali tiegħuf'ħin realiprestazzjoni u preċiżasinkronizzazzjoni tal-ħinkapaċitajiet, li jipprovdu appoġġ kritiku għall-kontroll tal-moviment ta' preċiżjoni għolja. Kemm jekk firobotika mobbli, awtomazzjoni industrijali, jew applikazzjonijiet speċjalizzati, jiżgura prestazzjoni operattiva stabbli u affidabbli.
Jiftaħar b'mod robustkompatibilità elettromanjetika (EMC)ukapaċitajiet kontra l-interferenza, flimkien ma' reżistenza eċċellenti għall-vibrazzjoni, li tiżgura tħaddim stabbli f'ambjenti elettromanjetiċi kumplessi. Id-disinn modulari jippermetti l-funzjonament indipendenti ta' kull komponent, u b'hekk itejjeb b'mod sinifikanti l-affidabbiltà u l-manutenzjoni tas-sistema.

Hekk kif l-industrija tar-robotika tavvanza lejn preċiżjoni ogħla u flessibilità akbar, l-arkitettura tal-kontroll tal-moviment qed tgħaddi minn evoluzzjoni sinifikanti minn ipproċessar ċentralizzat għal kollaborazzjoni distribwita. Il-kontrollur APQ KiWiBot, permezz ta' disinn domestiku u arkitettura kollaborattiva innovattiva ta' "moħħ kbir u żgħir", mhux biss jindirizza l-isfidi tal-kontroll ta' preċiżjoni għolja iżda jipprovdi wkoll lill-industrija b'pedament tekniku awtosuffiċjenti u kontrollabbli, u jwitti triq teknoloġika ġdida għaċ-Ċina fil-kompetizzjoni globali tal-intelliġenza inkorporata.
Ħin tal-posta: 14 ta' Novembru 2025