
ବିଶ୍ୱବ୍ୟାପୀ ମୂର୍ତ୍ତିମନ୍ତ ବୁଦ୍ଧିମତାର ପୃଷ୍ଠଭୂମି ବିରୁଦ୍ଧରେ, ରୋବୋଟ୍ ନିୟନ୍ତ୍ରକମାନଙ୍କର କାର୍ଯ୍ୟଦକ୍ଷତା ସେମାନଙ୍କ ବୁଦ୍ଧିମତା ସ୍ତରର ଏକ ପ୍ରମୁଖ ନିର୍ଣ୍ଣାୟକ ପାଲଟିଛି।APQ ରୁ ମୂର୍ତ୍ତିବଦ୍ଧ ବୁଦ୍ଧିମାନ ରୋବୋଟ୍ ନିୟନ୍ତ୍ରକମାନଙ୍କର KiWiBot ସିରିଜ୍ଅଭିନବ ମାଧ୍ୟମରେ ଉଚ୍ଚ-ସଠିକତା ଗତି ନିୟନ୍ତ୍ରଣ ପାଇଁ ଅଭିନବ ସମାଧାନ ପ୍ରଦାନ କରେଘରୋଇ ଡିଜାଇନ୍ ଏବଂ ଏକ "ବଡ଼-ମସ୍ତିଷ୍କ-ଛୋଟ-ମସ୍ତିଷ୍କ" ସହଯୋଗୀ ନିୟନ୍ତ୍ରଣ ସ୍ଥାପତ୍ୟ.

୦୧।
ପ୍ରଯୁକ୍ତିବିଦ୍ୟା ପୁନରାବୃତ୍ତି: ପରିମାଣ ଏବଂ କାର୍ଯ୍ୟଦକ୍ଷତାରେ ଦ୍ୱୈତ ସଫଳତା
ପ୍ରତିମୂର୍ତ୍ତିଯୁକ୍ତ ରୋବୋଟ୍ ନିୟନ୍ତ୍ରକମାନଙ୍କ ଉପରେ କଠୋର ଆବଶ୍ୟକତା ଲାଗୁ କରେ, ଯେଉଁଥିରେ ଅନ୍ତର୍ଭୁକ୍ତକମ୍ପାକ୍ଟ ଆକାର, ଉଚ୍ଚ କାର୍ଯ୍ୟଦକ୍ଷତା, ଉଚ୍ଚ ସମନ୍ୱୟ, ଉଚ୍ଚ ସ୍ଥିରତା, ଉଚ୍ଚ ବାସ୍ତବ-ସମୟ କ୍ଷମତା, ଏବଂ କମ୍ ଶବ୍ଦ। APQ KiWiBot ନିୟନ୍ତ୍ରକମାନଙ୍କର ଧାରାବାହିକ, ତିନି ପିଢ଼ିର ପ୍ରଯୁକ୍ତିବିଦ୍ୟା ବିକାଶ ମାଧ୍ୟମରେ, ପାରମ୍ପରିକ ନିୟନ୍ତ୍ରକମାନଙ୍କର ଯନ୍ତ୍ରଣା ବିନ୍ଦୁଗୁଡ଼ିକୁ ଧୀରେ ଧୀରେ ସମାଧାନ କରିଛି:
ଦିଦ୍ୱିତୀୟ-ପିଢ଼ିର ନିୟନ୍ତ୍ରକX86+Orin ସ୍ଥାପତ୍ୟ ଉପରେ ନିର୍ମାଣ କରେ, ଯେପରିକି ସୁବିଧା ପ୍ରଦାନ କରେବିବିଧ ମଡେଲ, ନମନୀୟ ଚୟନ, ଦୃଢ଼ ମାପଯୋଗ୍ୟତା, ଏବଂ କମ୍ପାକ୍ଟ ଆକାର.
ଦିତୃତୀୟ-ପିଢ଼ିର ନିୟନ୍ତ୍ରକସାମଗ୍ରିକ କାର୍ଯ୍ୟଦକ୍ଷତାକୁ ଆହୁରି ଉନ୍ନତ କରିଥାଏ, ସଂଯୋଗକାରୀମାନେ ଏକ ଗ୍ରହଣ କରନ୍ତିଅଟୋମୋଟିଭ୍ ୱାୟାରିଂ ହାର୍ନେସ୍ ସମାଧାନ, ଗୁରୁତ୍ୱପୂର୍ଣ୍ଣ ଭାବରେ ନିର୍ଭରଯୋଗ୍ୟତା ବୃଦ୍ଧି କରୁଛି।

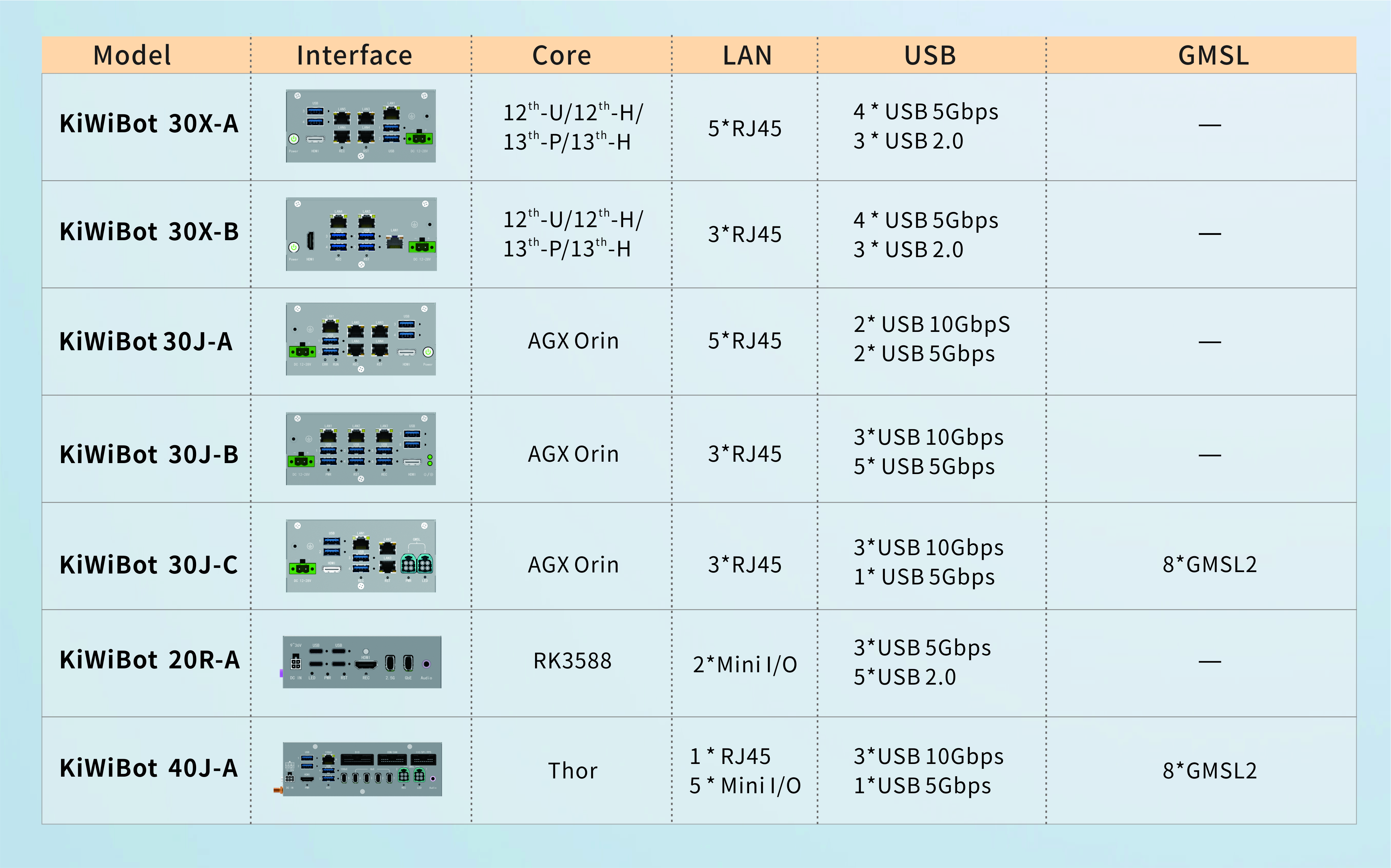
"କୋର୍ ସେରେବେଲମ୍ ଏବଂ ସେରେବ୍ରମ୍" ନିୟନ୍ତ୍ରକ ମଡେଲ୍ ସୁପାରିଶ
୦୨।
ଚାରୋଟି ସଂସ୍ଥାପନ ମୋଡ୍: ବିଭିନ୍ନ ପରିସ୍ଥିତିରେ ଖାପ ଖୁଆଇବା ପାଇଁ ନମନୀୟ।
ବିଭିନ୍ନ ପ୍ରୟୋଗ ପରିସ୍ଥିତିରେ ସର୍ବୋତ୍ତମ ଅନୁକୂଳନଶୀଳତା ସୁନିଶ୍ଚିତ କରିବା ପାଇଁ ନିୟନ୍ତ୍ରକ ଚାରୋଟି ସ୍ଥାପନ ପଦ୍ଧତି ପ୍ରଦାନ କରେ।
●ସେଲ୍-ମାଉଣ୍ଟେଡ୍ ସଂସ୍ଥାପନ: ପରିବେଶ ସୁରକ୍ଷା କାର୍ଯ୍ୟଦକ୍ଷତାକୁ ଉନ୍ନତ କରି, ଗଠନାତ୍ମକ ଶକ୍ତି ଏବଂ ପ୍ରଭାବ ପ୍ରତିରୋଧକୁ ବୃଦ୍ଧି କରେ।
●ସେଲ୍-ମୁକ୍ତ ସଂସ୍ଥାପନ: ଆଦର୍ଶ ପାମ୍ ଆକାରର ପରିମାପ, ତ୍ରିପଲ୍ କୁଲିଂ ସିଷ୍ଟମ୍ ନୀରବ ଏବଂ ସ୍ଥିର କାର୍ଯ୍ୟ ସୁନିଶ୍ଚିତ କରେ।
●ପାଖାପାଖି ସଂସ୍ଥାପନ: ଦୃଢ଼ ଗଠନ, ସହଜ ରକ୍ଷଣାବେକ୍ଷଣ
●ଷ୍ଟାକଡ୍ ସଂସ୍ଥାପନ: ଅତ୍ୟନ୍ତ ସମନ୍ୱିତ, ସ୍ଥାନ-ସଂରକ୍ଷକ, ସ୍ଥାନ-ସୀମିତ ପରିସ୍ଥିତି ପାଇଁ ଉପଯୁକ୍ତ
ସମଗ୍ର ସିରିଜ୍ ଏକ ଶିଳ୍ପ-ଗ୍ରେଡ୍ ଡିଜାଇନ୍ ଗ୍ରହଣ କରେ, ଯେଉଁଥିରେ ଉତ୍କୃଷ୍ଟ ପରିବେଶଗତ ଅନୁକୂଳନ ଏବଂ ନମନୀୟ ସ୍କେଲବିଲିଟି ରହିଛି।

୦୩।
ମୁଖ୍ୟ ସୁବିଧା: ସଠିକ୍ ଗତି ନିୟନ୍ତ୍ରଣକୁ ସଶକ୍ତ କରିବା
ଏହି ନିୟନ୍ତ୍ରକର ମୂଳ ସୁବିଧା ଏହାର ଅସାଧାରଣପ୍ରକୃତ-ସମୟକାର୍ଯ୍ୟଦକ୍ଷତା ଏବଂ ସଠିକ୍ସମୟ ସିଙ୍କ୍ରୋନାଇଜେସନ୍କ୍ଷମତା, ଉଚ୍ଚ-ନିର୍ଦ୍ଦିଷ୍ଟ ଗତି ନିୟନ୍ତ୍ରଣ ପାଇଁ ଗୁରୁତ୍ୱପୂର୍ଣ୍ଣ ସମର୍ଥନ ପ୍ରଦାନ କରୁଛି। କି ନାହିଁମୋବାଇଲ୍ ରୋବୋଟିକ୍ସ, ଶିଳ୍ପ ସ୍ୱୟଂଚାଳିତକରଣ, କିମ୍ବା ବିଶେଷ ପ୍ରୟୋଗ, ଏହା ସ୍ଥିର ଏବଂ ନିର୍ଭରଯୋଗ୍ୟ କାର୍ଯ୍ୟଦକ୍ଷତା ସୁନିଶ୍ଚିତ କରେ।
ଏହା ଦୃଢ଼ଇଲେକ୍ଟ୍ରୋମ୍ୟାଗ୍ନେଟିକ ସୁସଙ୍ଗତତା (EMC)ଏବଂହସ୍ତକ୍ଷେପ-ବିରୋଧୀ କ୍ଷମତା, ଉତ୍କୃଷ୍ଟ କମ୍ପନ ପ୍ରତିରୋଧ ସହିତ ମିଳିତ, ଜଟିଳ ବିଦ୍ୟୁତ୍-ଚୁମ୍ବକୀୟ ପରିବେଶରେ ସ୍ଥିର କାର୍ଯ୍ୟ ସୁନିଶ୍ଚିତ କରେ। ମଡ୍ୟୁଲାର୍ ଡିଜାଇନ୍ ପ୍ରତ୍ୟେକ ଉପାଦାନର ସ୍ୱାଧୀନ କାର୍ଯ୍ୟକୁ ସକ୍ଷମ କରିଥାଏ, ଯାହା ସିଷ୍ଟମର ନିର୍ଭରଯୋଗ୍ୟତା ଏବଂ ରକ୍ଷଣାବେକ୍ଷଣକୁ ଉଲ୍ଲେଖନୀୟ ଭାବରେ ବୃଦ୍ଧି କରିଥାଏ।

ରୋବୋଟିକ୍ସ ଶିଳ୍ପ ଉଚ୍ଚତର ସଠିକତା ଏବଂ ଅଧିକ ନମନୀୟତା ଆଡ଼କୁ ଅଗ୍ରସର ହେଉଥିବାରୁ, ଗତି ନିୟନ୍ତ୍ରଣ ସ୍ଥାପତ୍ୟ କେନ୍ଦ୍ରୀକୃତ ପ୍ରକ୍ରିୟାକରଣରୁ ବଣ୍ଟିତ ସହଯୋଗ ପର୍ଯ୍ୟନ୍ତ ଏକ ଗୁରୁତ୍ୱପୂର୍ଣ୍ଣ ବିବର୍ତ୍ତନ ଦେଇ ଗତି କରୁଛି। ଘରୋଇ ଡିଜାଇନ୍ ଏବଂ ଅଭିନବ "ବଡ଼ ଏବଂ ଛୋଟ ମସ୍ତିଷ୍କ" ସହଯୋଗୀ ସ୍ଥାପତ୍ୟ ମାଧ୍ୟମରେ APQ KiWiBot ନିୟନ୍ତ୍ରକ କେବଳ ଉଚ୍ଚ-ସଠିକତା ନିୟନ୍ତ୍ରଣର ଚ୍ୟାଲେଞ୍ଜଗୁଡ଼ିକୁ ସମାଧାନ କରେ ନାହିଁ ବରଂ ଶିଳ୍ପକୁ ଏକ ଆତ୍ମନିର୍ଭରଶୀଳ ଏବଂ ନିୟନ୍ତ୍ରଣଯୋଗ୍ୟ ବୈଷୟିକ ଭିତ୍ତିଭୂମି ମଧ୍ୟ ପ୍ରଦାନ କରେ, ଯାହା ବିଶ୍ୱ ମୂର୍ତ୍ତିଗତ ବୁଦ୍ଧିମତ୍ତା ପ୍ରତିଯୋଗିତାରେ ଚୀନ୍ ପାଇଁ ଏକ ନୂତନ ପ୍ରଯୁକ୍ତିବିଦ୍ୟା ପଥ ପ୍ରସ୍ତୁତ କରେ।
ପୋଷ୍ଟ ସମୟ: ନଭେମ୍ବର-୧୪-୨୦୨୫