
W obliczu globalnej fali ucieleśnionej inteligencji, wydajność kontrolerów robotów stała się kluczowym czynnikiem decydującym o poziomie ich inteligencji.Seria inteligentnych kontrolerów robotów KiWiBot firmy APQoferuje przełomowe rozwiązania w zakresie precyzyjnego sterowania ruchem poprzez innowacyjneprojekt krajowy i architektura sterowania opartego na współpracy „dużego i małego mózgu”.

01.
Iteracja technologiczna: podwójne przełomy w zakresie wolumenu i wydajności
W przypadku robotów wcielonych obowiązują rygorystyczne wymagania dotyczące kontrolerów, w tym:kompaktowy rozmiar, wysoka wydajność, wysoka integracja, wysoka stabilność, wysoka zdolność do pracy w czasie rzeczywistym i niski poziom szumówSeria kontrolerów APQ KiWiBot, dzięki trzem generacjom ewolucji technologicznej, stopniowo rozwiązywała problemy tradycyjnych kontrolerów:
Tenkontroler drugiej generacjiopiera się na architekturze X86+Orin, oferując takie zalety, jakróżnorodne modele, elastyczny wybór, duża skalowalność i kompaktowy rozmiar.
Tenkontroler trzeciej generacjidodatkowo optymalizuje ogólną wydajność, dzięki zastosowaniu złączyrozwiązanie wiązki przewodów samochodowych, co znacznie zwiększa niezawodność.

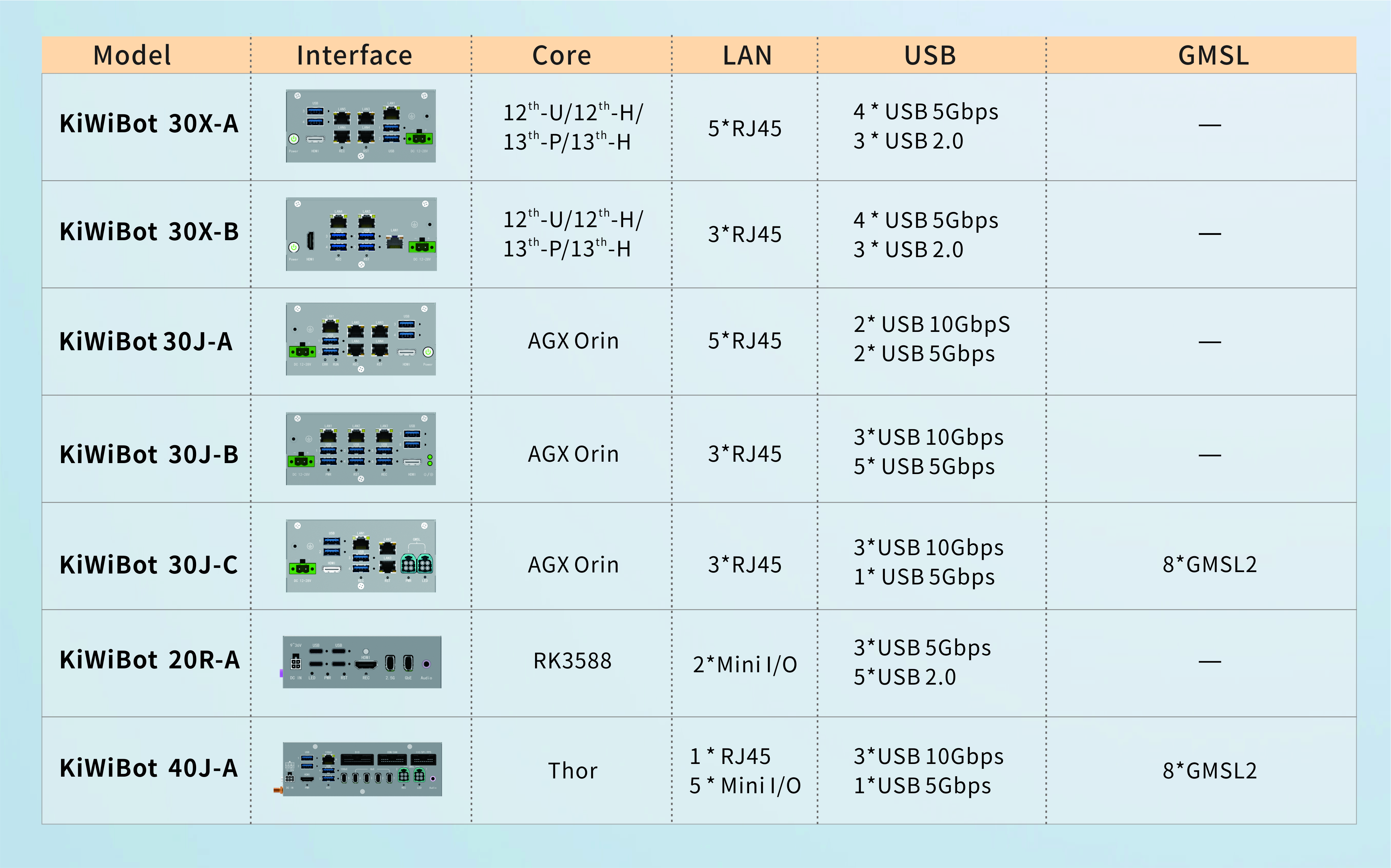
Zalecenie modelu kontrolera „Core Cerebellum and Cerebrum”
02.
Cztery tryby instalacji: elastyczność pozwalająca dostosować się do różnych scenariuszy
Kontroler oferuje cztery metody instalacji, co gwarantuje optymalną adaptację do różnych scenariuszy zastosowań.
●Instalacja na muszli: Zwiększa wytrzymałość konstrukcyjną i odporność na uderzenia, poprawiając ochronę środowiska
●Instalacja bez powłoki:Idealne wymiary wielkości dłoni, potrójny system chłodzenia zapewnia cichą i stabilną pracę
●Instalacja obok siebie:Solidna konstrukcja, łatwa konserwacja
●Instalacja piętrowa:Wysoce zintegrowany, oszczędzający miejsce, odpowiedni do scenariuszy z ograniczoną przestrzenią
Cała seria charakteryzuje się konstrukcją klasy przemysłowej, doskonałą adaptacją do warunków środowiskowych i elastyczną skalowalnością.

03.
Główna zaleta: umożliwienie precyzyjnej kontroli ruchu
Główne zalety tego kontrolera polegają na jego wyjątkowejw czasie rzeczywistymwydajność i precyzjasynchronizacja czasumożliwości, zapewniając krytyczne wsparcie dla precyzyjnego sterowania ruchem. Niezależnie od tego, czyrobotyka mobilna, automatyka przemysłowa lub specjalistyczne aplikacje, zapewnia stabilną i niezawodną pracę operacyjną.
Posiada solidną konstrukcjękompatybilność elektromagnetyczna (EMC)Imożliwości przeciwzakłóceniowe, w połączeniu z doskonałą odpornością na wibracje, zapewnia stabilną pracę w złożonych środowiskach elektromagnetycznych. Modułowa konstrukcja umożliwia niezależne działanie każdego komponentu, znacznie zwiększając niezawodność i łatwość konserwacji systemu.

Wraz z rozwojem branży robotyki w kierunku wyższej precyzji i większej elastyczności, architektura sterowania ruchem przechodzi znaczącą ewolucję – od scentralizowanego przetwarzania do rozproszonej współpracy. Kontroler APQ KiWiBot, dzięki rodzimej konstrukcji i innowacyjnej architekturze współpracy „dużego i małego mózgu”, nie tylko stawia czoła wyzwaniom precyzyjnego sterowania, ale także zapewnia branży autonomiczne i kontrolowalne podstawy techniczne, torując Chinom nową ścieżkę technologiczną w globalnym wyścigu o ucieleśnioną inteligencję.
Czas publikacji: 14-11-2025