
Дар заминаи мавҷи ҷаҳонии зеҳни таҷассумёфта, самаранокии контроллерҳои робот ба омили асосии муайянкунандаи сатҳи зеҳни онҳо табдил ёфтааст.Силсилаи контроллерҳои роботҳои интеллектуалии KiWiBot аз APQтавассути инноватсионӣ роҳҳои ҳалли пешрафтаро барои идоракунии дақиқи ҳаракат пешниҳод мекунадтарроҳии дохилӣ ва меъмории идоракунии муштараки "калон-мағзи калон-мағзи хурд".

01.
Итератсияи технологӣ: Ду пешрафт дар ҳаҷм ва самаранокӣ
Роботҳои таҷассумёфта ба контроллерҳо талаботи сахтро муқаррар мекунанд, аз ҷумлаандозаи паймон, иҷрои баланд, ҳамгироии баланд, устувории баланд, қобилияти баланди вақти воқеӣ ва садои пастСилсилаи контроллерҳои APQ KiWiBot, дар тӯли се насли таҳаввулоти технологӣ, тадриҷан нуқтаҳои нохуши контроллерҳои анъанавиро ҳал кардааст:
Дарконтроллери насли дуюмбар меъмории X86+Orin асос ёфта, бартариҳои ба монандимоделҳои гуногун, интихоби чандир, миқёспазирии қавӣ ва андозаи паймон.
Дарконтроллери насли сеюмбоз ҳам беҳтарсозии кори умумӣ бо пайвасткунакҳоҳалли васлаки симкашии автомобилӣ, эътимоднокиро ба таври назаррас афзоиш медиҳад.

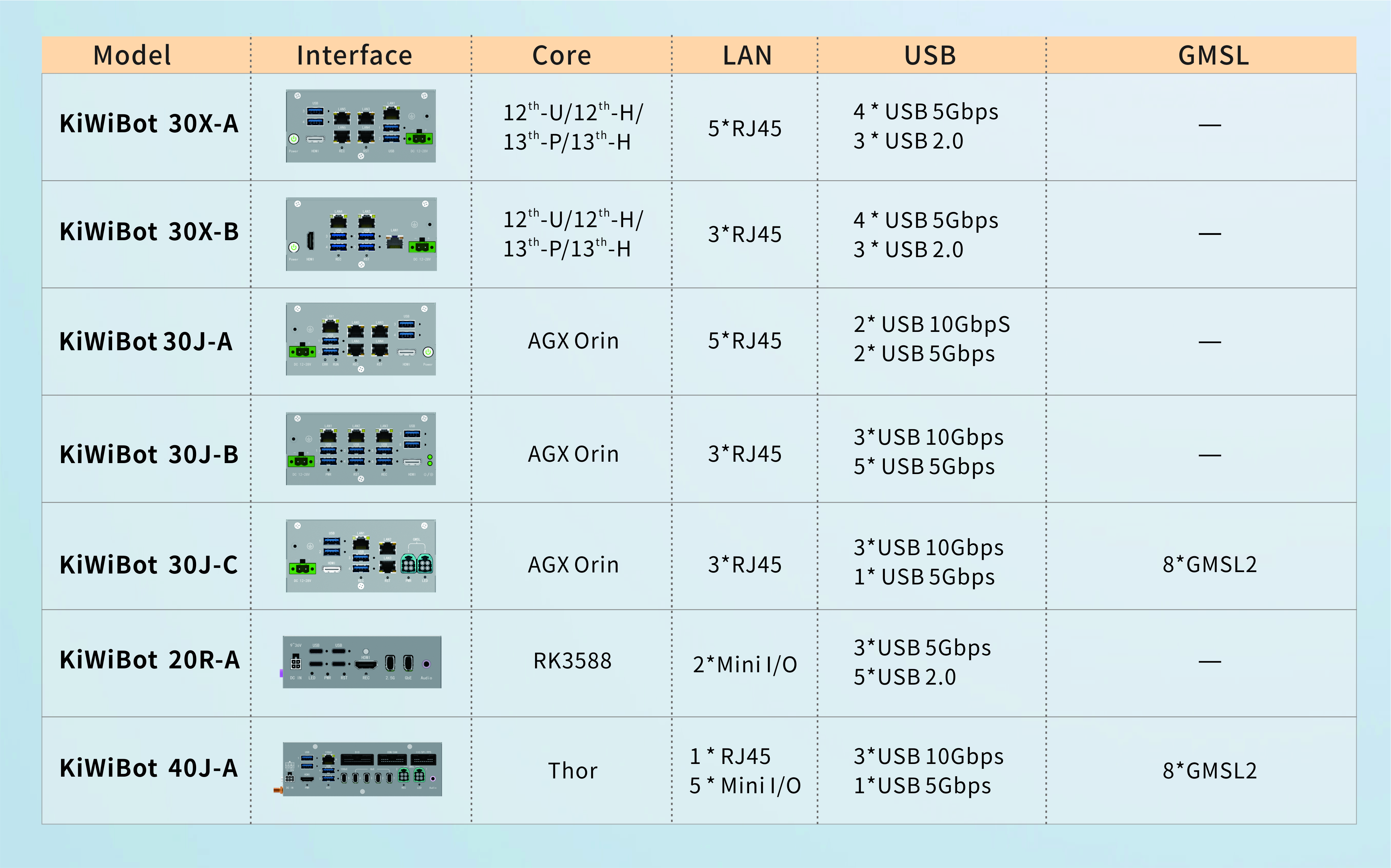
Контроллери "Core Cerebellum and Cerebrum" Тавсияи модел
02.
Чор ҳолати насб: чандир барои мутобиқ шудан ба сенарияҳои гуногун
Контроллер чор усули насбкуниро пешниҳод мекунад, то мутобиқшавии беҳтаринро дар сенарияҳои гуногуни барнома таъмин намояд.
●Насби дар корпус насбшуда: Мустаҳкамии сохтор ва муқовимат ба зарбаро афзоиш медиҳад, самаранокии ҳифзи муҳити зистро беҳтар мекунад
●Насби беқабатАндозаҳои беҳтарин ба андозаи кафи даст, системаи сегонаи хунуккунӣ кори ором ва устуворро таъмин мекунад
●Насби паҳлӯ ба паҳлӯСохтори мустаҳкам, нигоҳдории осон
●Насби қабат-қабат: Ба таври баланд ҳамгирошуда, сарфакунандаи фазо, барои сенарияҳои маҳдуди фазо мувофиқ аст
Тамоми силсила тарҳи саноатиро қабул мекунад, ки дорои мутобиқшавии аълои муҳити зист ва миқёспазирии чандир мебошад.

03.
Бартарии асосӣ: Тақвияти назорати дақиқи ҳаракат
Афзалиятҳои асосии ин танзимгари беназир дар он аствақти ҳақиқӣиҷроиш ва дақиқӣҳамоҳангсозии вақтқобилиятҳо, ки дастгирии муҳимро барои идоракунии дақиқи баландсифат таъмин мекунанд. Новобаста аз он ки дарробототехникаи мобилӣ, автоматикунонии саноатӣ ё барномаҳои махсусгардонидашуда, он фаъолияти устувор ва боэътимодро таъмин мекунад.
Он дорои қуввати баланд астМутобиқати электромагнитӣ (EMC)вақобилиятҳои зидди дахолат, дар якҷоягӣ бо муқовимати аълои ларзиш, кори устуворро дар муҳитҳои мураккаби электромагнитӣ таъмин мекунад. Тарҳи модулӣ имкон медиҳад, ки ҳар як ҷузъ мустақилона кор кунад ва эътимоднокӣ ва нигоҳдории системаро ба таври назаррас беҳтар созад.

Ҳангоме ки саноати робототехника ба самти дақиқии баландтар ва чандирии бештар пеш меравад, меъмории идоракунии ҳаракат аз коркарди марказонидашуда то ҳамкории тақсимшуда таҳаввулоти назаррасро аз сар мегузаронад. Контроллери APQ KiWiBot, тавассути тарҳи дохилӣ ва меъмории инноватсионии ҳамкории "мағзи калон ва хурд", на танҳо мушкилоти назорати дақиқи баландро ҳал мекунад, балки ба соҳа заминаи техникии худкифо ва идорашавандаро фароҳам меорад ва роҳи нави технологӣ барои Чинро дар рақобати ҷаҳонии зеҳни таҷассумёфта ҳамвор мекунад.
Вақти нашр: 14 ноябри соли 2025