
Amb la ràpida popularització dels robots intel·ligents avui dia, les demandes operatives dels robots en la inspecció d'incendis, la recepció de serveis i l'emmagatzematge i la manipulació en entorns complexos són cada cop més grans. Aquests robots no només necessiten dur a terme tasques bàsiques de mobilitat, sinó que també requereixen capacitats intel·ligents com la percepció ambiental, la presa de decisions en temps real i la col·laboració multirobot. Un controlador fiable, d'alt rendiment i adaptable s'ha convertit en la clau per determinar si els robots es poden desplegar de manera estable en diversos escenaris.
Tres reptes principals en la implementació de múltiples escenaris

En la implementació pràctica, els sistemes de control de robots sovint s'enfronten a tres reptes principals:
Ansietat pel poder de càlcul:Les tasques d'IA com el reconeixement visual, el mapatge SLAM i la planificació de rutes requereixen una potència de càlcul extremadament alta, i els controladors tradicionals no poden complir els requisits de resposta en temps real;
Coll d'ampolla d'expansió:Hi ha diversos tipus de perifèrics com ara LiDAR, multicàmera, sensors ultrasònics, mòduls de comunicació 5G, etc., i el nombre i els tipus d'interfícies s'han convertit en colls d'ampolla d'integració;
L'entorn és dur:Les diferències de temperatura exterior, les fluctuacions de voltatge en llocs industrials, les vibracions de la pols i altres factors ambientals representen un greu repte per al funcionament estable a llarg termini dels equips.
TAC-3000 Pro: Injectant un nucli "tot en un" en robots

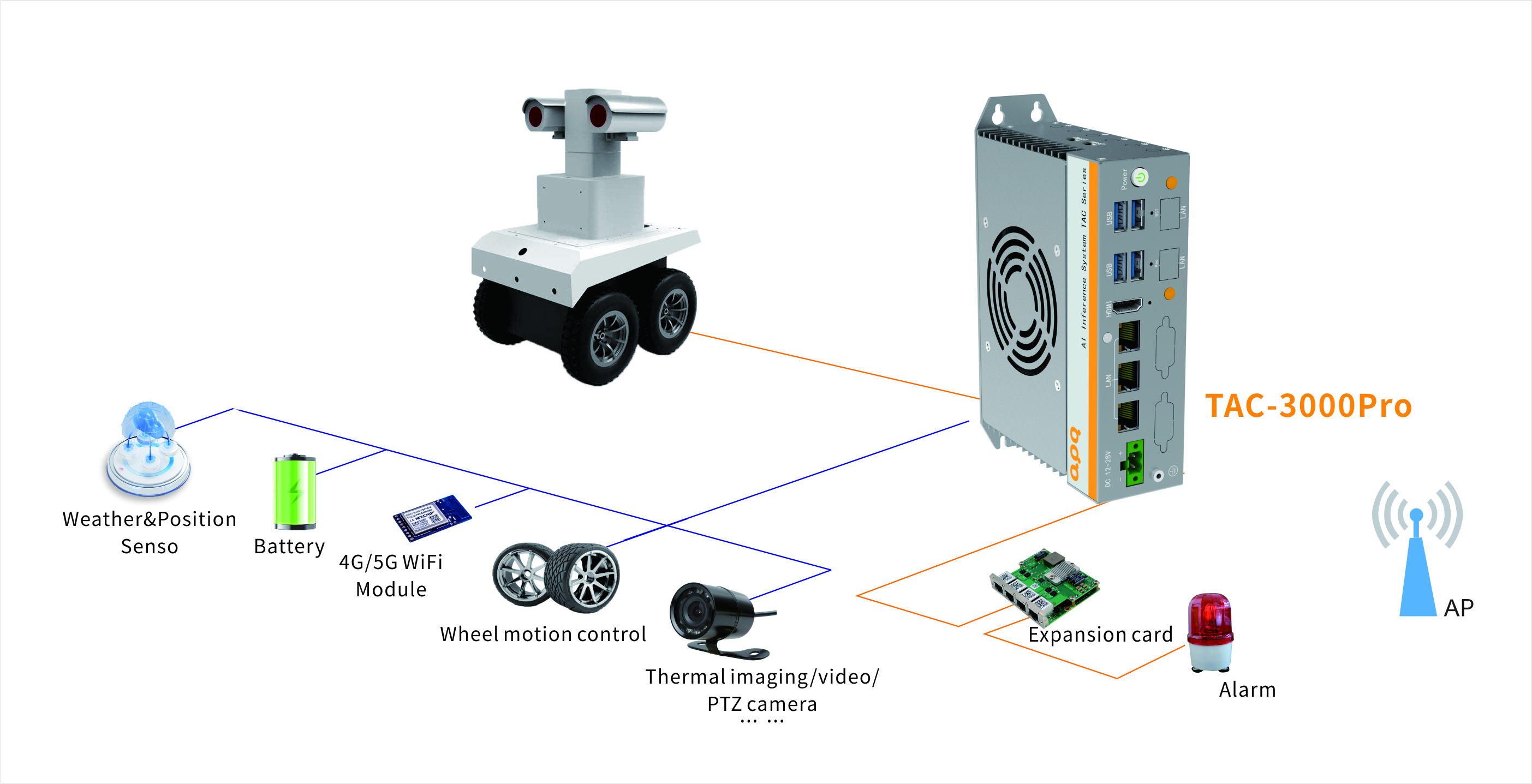
L'APQTAC-3000 Prose centra en "una gran potència de càlcul, múltiples interfícies, alta fiabilitat i fàcil integració", proporcionant als robots una base de control intel·ligent de grau veritablement industrial:
Plataforma informàtica potent:equipat ambSèrie NVIDIA ® Jetson Orin Nano/NXmòdul, compatible amb el mode Super, amb una potència de càlcul d'IA de fins a 157 TOPS, capaç de gestionar fàcilment tasques d'alta càrrega com ara navegació i evitació d'obstacles, reconeixement visual, planificació de moviments, etc.
Interfícies d'expansió riques:Proporciona3 ports Gigabit Ethernet, 4 USB, 1 HDMI,suports4 x RS232/RS485, CAN FD, GPIOi altres extensions, compatibles amb extensions 5G/4G i Wi-Fi, i fàcil accés a múltiples tipus de sensors i mòduls de comunicació;
Disseny durador i fiable:SuportsEntrada de CC de tensió ampla de 12-28 V, rang de temperatura de funcionament de-20 ℃ ~ 60 ℃, cos totalment metàl·lic i dissipació activa de calor del ventilador, adequat per a entorns industrials com ara vibracions i alta humitat;
Mètode d'instal·lació flexible:Admet la instal·lació en carril DIN i en orella penjant, mida compacta (150,7 × 114,5 × 45 mm), fàcil d'integrar en diverses estructures de robots.
Una experiència de robot més intel·ligent, integrada i fiable
- L'alta potència de càlcul permet una navegació precisa, l'evitació dinàmica d'obstacles i la monitorització ambiental en temps real, millorant la precisió i la velocitat de resposta de les operacions del robot;
- El disseny multiinterfície redueix els costos externs de commutació i expansió, accelera els cicles d'integració i depuració del sistema;
- L'ampli rang de temperatura i pressió, així com l'estructura robusta, garanteixen el funcionament estable a llarg termini del robot en escenaris com ara l'extinció d'incendis, la inspecció i els AGV a l'aire lliure, reduint la freqüència de manteniment.

L'APQ TAC-3000 Pro no és només un controlador de maquinari, sinó també una "plataforma de capacitats" per a la intel·ligència de robots i el desenvolupament de múltiples escenaris. Ajuda els robots a operar de manera estable i eficient en entorns complexos mitjançant la computació d'alt rendiment, l'escalabilitat flexible i la fiabilitat de nivell industrial, ajudant les empreses a accelerar la transició dels robots de "mòbils" a "intel·ligents" i de "prova d'un sol punt" a "desplegament a escala".
Data de publicació: 25 de desembre de 2025