
Con la rapida diffusione dei robot intelligenti, le esigenze operative dei robot in ambiti come l'ispezione antincendio, l'accoglienza clienti, lo stoccaggio e la movimentazione in ambienti complessi sono in costante aumento. Questi robot non devono solo svolgere compiti di mobilità di base, ma richiedono anche capacità intelligenti come la percezione ambientale, il processo decisionale in tempo reale e la collaborazione tra più robot. Un sistema di controllo affidabile, performante e adattabile è diventato fondamentale per garantire la stabilità e l'impiego dei robot in diversi scenari.
Tre sfide principali nell'implementazione multi-scenario

Nell'implementazione pratica, i sistemi di controllo dei robot si trovano spesso ad affrontare tre sfide principali:
Ansia da potenza di calcolo:Le attività di intelligenza artificiale come il riconoscimento visivo, la mappatura SLAM e la pianificazione del percorso richiedono una potenza di calcolo estremamente elevata, e i controllori tradizionali non sono in grado di soddisfare i requisiti di risposta in tempo reale;
Collo di bottiglia dell'espansione:Esistono vari tipi di periferiche, come LiDAR, telecamere multiple, sensori a ultrasuoni, moduli di comunicazione 5G, ecc., e il numero e i tipi di interfacce sono diventati colli di bottiglia per l'integrazione;
L'ambiente è ostile:Le differenze di temperatura esterna, le fluttuazioni di tensione nei siti industriali, le vibrazioni causate dalla polvere e altri fattori ambientali rappresentano una seria sfida per il funzionamento stabile a lungo termine delle apparecchiature.
TAC-3000 Pro: Integrare un "nucleo tutto in uno" nei robot

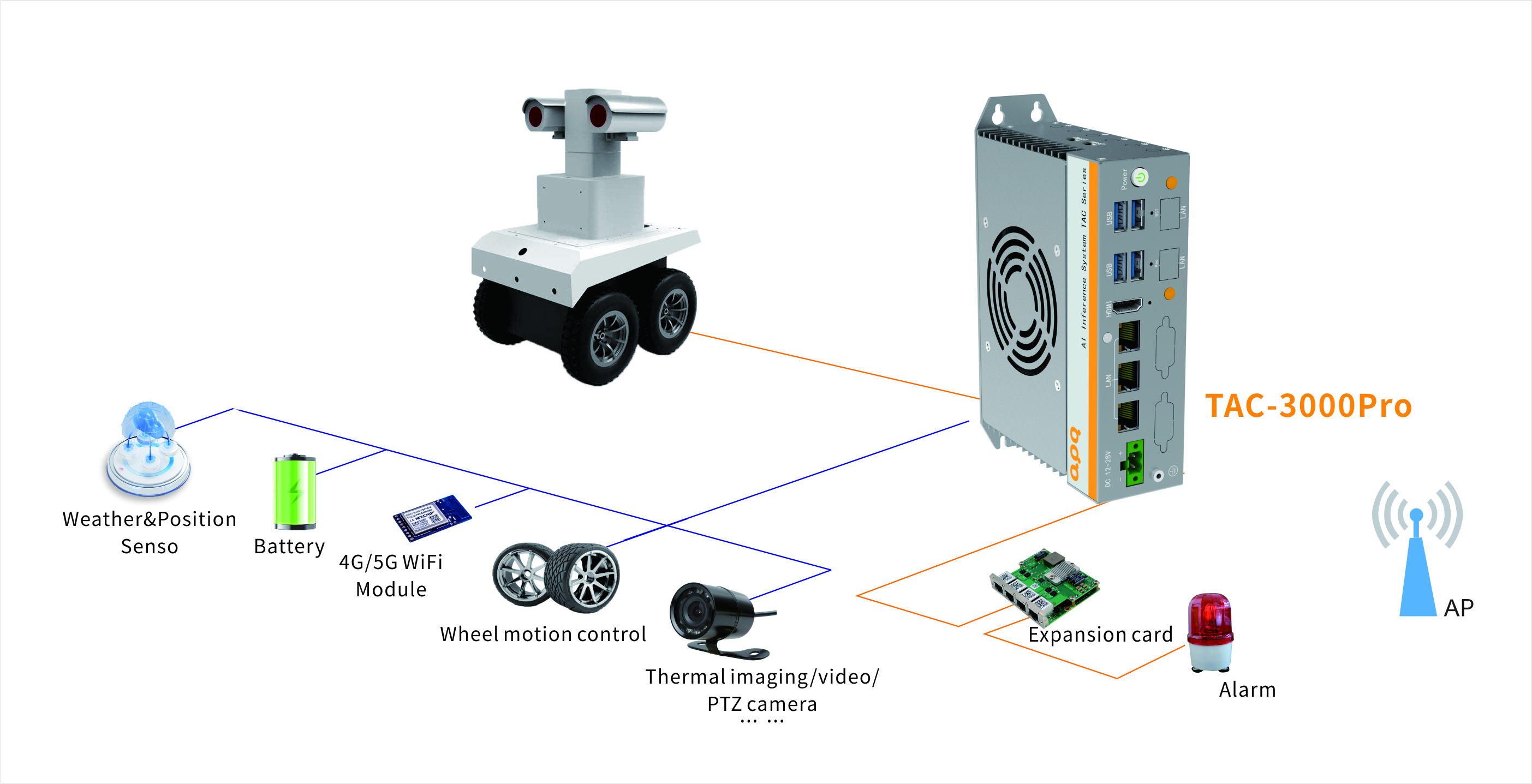
L'APQTAC-3000 Proè incentrato su "elevata potenza di calcolo, molteplici interfacce, alta affidabilità e facile integrazione", fornendo ai robot una base di controllo intelligente di livello industriale:
Potente piattaforma di calcolo:dotato diSerie NVIDIA® Jetson Orin Nano/NXmodulo, supporta la modalità Super, con una potenza di calcolo AI fino a 157 TOPS, in grado di gestire facilmente attività ad alto carico come navigazione ed evitamento degli ostacoli, riconoscimento visivo, pianificazione del movimento, ecc.;
Interfacce di espansione ricche:Fornisce3 porte Gigabit Ethernet, 4 porte USB, 1 porta HDMI,supporta4 x RS232/RS485, CAN FD, GPIOe altre estensioni, compatibili con 5G/4G, estensioni Wi-Fi e facile accesso a molteplici tipi di sensori e moduli di comunicazione;
Design resistente e affidabile:SupportiIngresso CC ad ampio intervallo di tensione 12-28 V, intervallo di temperatura di funzionamento di-20 ℃~60 ℃Corpo interamente in metallo e dissipazione del calore tramite ventola attiva, adatto ad ambienti industriali come quelli con vibrazioni e alta umidità;
Metodo di installazione flessibile:Supporta l'installazione su guida DIN e con staffe di sospensione, dimensioni compatte (150,7 × 114,5 × 45 mm), facile da integrare in diverse strutture robotiche.
Un'esperienza robotica più intelligente, integrata e affidabile.
- L'elevata potenza di calcolo supporta la navigazione precisa, l'evitamento dinamico degli ostacoli e il monitoraggio ambientale in tempo reale, migliorando la precisione e la velocità di risposta delle operazioni del robot;
- La progettazione multi-interfaccia riduce i costi di commutazione e di espansione esterni, accelera i cicli di integrazione e debug del sistema;
- L'ampio intervallo di temperatura e pressione, unitamente alla robusta struttura, garantiscono un funzionamento stabile a lungo termine del robot in scenari quali la lotta antincendio, le ispezioni e l'impiego di veicoli a guida automatica (AGV) in ambienti esterni, riducendo la frequenza degli interventi di manutenzione.

L'APQ TAC-3000 Pro non è solo un controller hardware, ma anche una "piattaforma di capacità" per l'intelligenza robotica e lo sviluppo multi-scenario. Consente ai robot di operare in modo stabile ed efficiente in ambienti complessi grazie a un'elevata capacità di calcolo, una scalabilità flessibile e un'affidabilità di livello industriale, aiutando le aziende ad accelerare la transizione dei robot da "mobili" a "intelligenti" e da "test in un singolo punto" a "implementazione su larga scala".
Data di pubblicazione: 25 dicembre 2025


