
Cù a rapida pupularizazione di i robot intelligenti oghje, l'esigenze operative di i robot in l'ispezione di l'incendii, a ricezione di servizii, è u magazzinu è a manipulazione in ambienti cumplessi sò sempre più in crescita. Quessi robot ùn anu micca solu bisognu di realizà compiti di mobilità basica, ma richiedenu ancu capacità intelligenti cum'è a percezione ambientale, a presa di decisioni in tempu reale è a cullaburazione multi-robot. Un controller affidabile, d'alte prestazioni è adattabile hè diventatu a chjave per sapè se i robot ponu esse implementati stabilmente in diversi scenarii.
Trè sfide maiò in l'implementazione di parechji scenarii

In a pratica, i sistemi di cuntrollu di robot si trovanu spessu di fronte à trè sfide principali:
Ansietà di putenza di calculu:I travaglii di l'IA cum'è u ricunniscimentu visuale, a mappatura SLAM è a pianificazione di percorsi richiedenu una putenza di calculu estremamente elevata, è i cuntrolli tradiziunali ùn sò micca capaci di risponde à i requisiti di risposta in tempu reale;
Collu di buttiglia di espansione:Ci sò diversi tipi di periferiche cum'è LiDAR, multicamera, sensori ultrasonici, moduli di cumunicazione 5G, ecc., è u numeru è i tipi di interfacce sò diventati colli di buttiglia d'integrazione;
L'ambiente hè duru:E differenze di temperatura esterna, e fluttuazioni di tensione in i siti industriali, e vibrazioni di a polvere è altri fattori ambientali rapprisentanu una sfida seria per u funziunamentu stabile à longu andà di l'attrezzatura.
TAC-3000 Pro: Iniezione di un "core tuttu in unu" in i robot

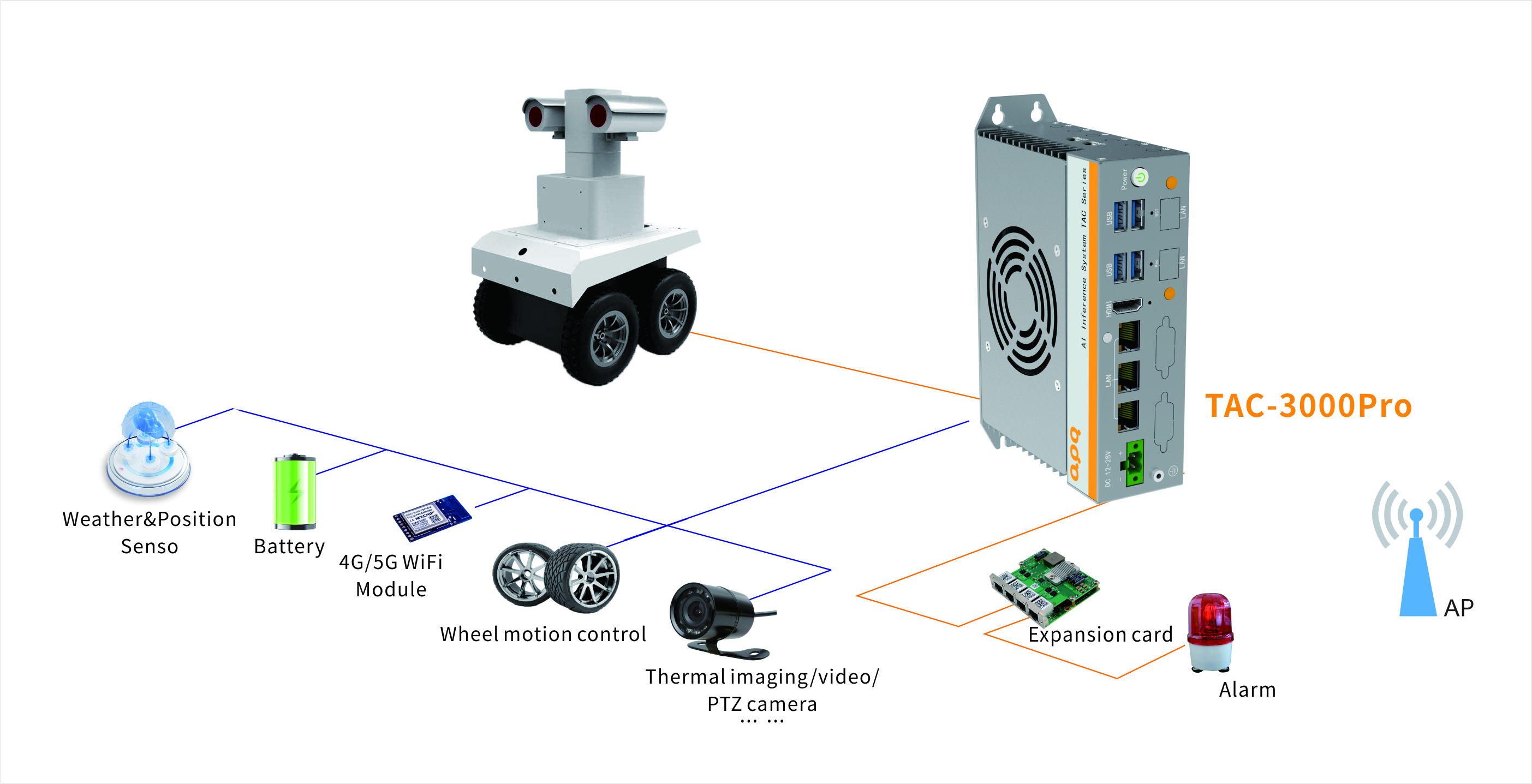
L'APQTAC-3000 Prohè centratu intornu à "forte putenza di calculu, interfacce multiple, alta affidabilità è integrazione faciule", furnendu à i robot una basa di cuntrollu intelligente di qualità veramente industriale:
Piattaforma informatica putente:equipatu cùSerie NVIDIA ® Jetson Orin Nano/NXModulu, supporta a modalità Super, cù una putenza di calculu AI finu à 157 TOPS, facilmente capace di gestisce compiti à carica elevata cum'è a navigazione è l'evitazione di ostaculi, u ricunniscenza visuale, a pianificazione di u muvimentu, ecc.;
Interfacce di espansione ricche:Fornisce3 porti Gigabit Ethernet, 4 USB, 1 HDMI,supporti4 x RS232/RS485, CAN FD, GPIOè altre estensioni, cumpatibili cù 5G/4G, estensioni Wi-Fi, è accessu faciule à parechji tippi di sensori è moduli di cumunicazione;
Cuncepimentu durevule è affidabile:SupportaIngressu CC à tensione larga 12-28V, gamma di temperatura di funziunamentu di-20 ℃ ~ 60 ℃, tuttu u corpu in metallu è dissipazione attiva di u calore di u ventilatore, adattatu per ambienti industriali cum'è vibrazioni è alta umidità;
Metudu d'installazione flessibile:Supporta l'installazione su guida DIN è su arechja sospesa, dimensioni compatte (150,7 × 114,5 × 45 mm), facile da integrà in diverse strutture robotiche.
Una sperienza robotica più intelligente, più integrata è più affidabile
- Una putenza di calculu elevata supporta a navigazione precisa, l'evità dinamica di l'ostaculi è u monitoraghju ambientale in tempu reale, migliurendu a precisione è a velocità di risposta di l'operazioni di i robot;
- U cuncepimentu multi-interfaccia riduce i costi di cummutazione è espansione esterni, accelera i cicli d'integrazione è di debugging di u sistema;
- L'ampia gamma di temperatura è pressione, è ancu a struttura robusta, garantiscenu u funziunamentu stabile à longu andà di u robot in scenarii cum'è a lotta contru l'incendii, l'ispezione è l'AGV esterni, riducendu a frequenza di manutenzione.

L'APQ TAC-3000 Pro ùn hè micca solu un controller hardware, ma ancu una "piattaforma di capacità" per l'intelligenza di i robot è u sviluppu di scenarii multipli. Aiuta i robot à operà in modu stabile è efficiente in ambienti cumplessi attraversu l'informatica ad alte prestazioni, a scalabilità flessibile è l'affidabilità di qualità industriale, aiutendu l'imprese à accelerà a transizione di i robot da "mobile" à "intelligente" è da "prova à puntu unicu" à "implementazione su scala".
Data di publicazione: 25 dicembre 2025