
Avec la popularisation rapide des robots intelligents, les exigences opérationnelles de ces robots dans les domaines de l'inspection incendie, de l'accueil et de la manutention en environnements complexes sont en constante augmentation. Ces robots doivent non seulement accomplir des tâches de mobilité de base, mais aussi posséder des capacités intelligentes telles que la perception de l'environnement, la prise de décision en temps réel et la collaboration multi-robots. Un contrôleur fiable, performant et adaptable est devenu essentiel pour garantir un déploiement stable des robots dans divers contextes.
Trois défis majeurs dans la mise en œuvre multiscénarios

En pratique, les systèmes de commande de robots sont souvent confrontés à trois défis majeurs :
Anxiété liée à la puissance de calcul :Les tâches d'IA telles que la reconnaissance visuelle, la cartographie SLAM et la planification de trajectoire nécessitent une puissance de calcul extrêmement élevée, et les contrôleurs traditionnels ne sont pas capables de répondre aux exigences de réponse en temps réel ;
Goulot d'étranglement de l'expansion :Il existe différents types de périphériques tels que LiDAR, multicaméras, capteurs ultrasoniques, modules de communication 5G, etc., et le nombre et les types d'interfaces sont devenus des goulots d'étranglement en matière d'intégration ;
L'environnement est hostile :Les différences de température extérieure, les fluctuations de tension sur les sites industriels, les vibrations dues à la poussière et d'autres facteurs environnementaux constituent un défi majeur pour le fonctionnement stable à long terme des équipements.
TAC-3000 Pro : Intégrer un « noyau tout-en-un » dans les robots

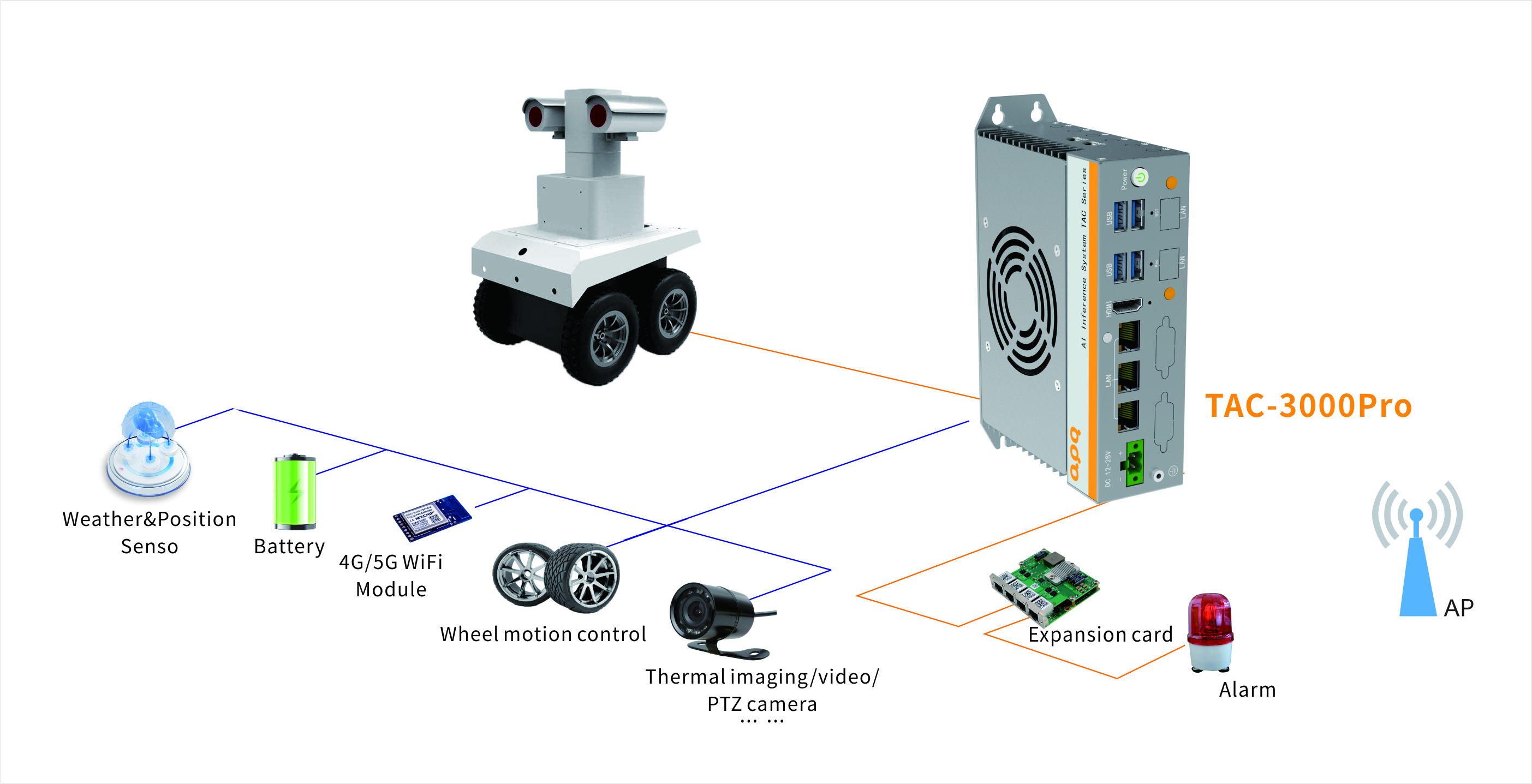
L'APQTAC-3000 ProElle s'articule autour d'une « puissance de calcul élevée, de multiples interfaces, d'une grande fiabilité et d'une intégration facile », offrant aux robots une base de contrôle intelligente de qualité véritablement industrielle :
Plateforme informatique puissante :équipé deSérie NVIDIA® Jetson Orin Nano/NXmodule, prend en charge le mode Super, avec une puissance de calcul IA allant jusqu'à 157 TOPS, capable de gérer facilement des tâches à charge élevée telles que la navigation et l'évitement d'obstacles, la reconnaissance visuelle, la planification de mouvement, etc. ;
Interfaces d'extension riches :Fournit3 ports Ethernet Gigabit, 4 ports USB, 1 port HDMI,supports4 ports RS232/RS485, CAN FD, GPIOet d'autres extensions, compatibles avec les extensions 5G/4G et Wi-Fi, et un accès facile à de multiples types de capteurs et de modules de communication ;
Conception durable et fiable :SupportsEntrée CC à large plage de tension 12-28 V, plage de températures de fonctionnement de-20 ℃~60 ℃, corps entièrement métallique et dissipation thermique par ventilateur actif, adapté aux environnements industriels tels que les vibrations et une humidité élevée ;
Méthode d'installation flexible :Supporte l'installation sur rail DIN et sur oreille de suspension, taille compacte (150,7 × 114,5 × 45 mm), facile à intégrer dans diverses structures de robots.
Une expérience robotique plus intelligente, plus intégrée et plus fiable
- La puissance de calcul élevée permet une navigation précise, l'évitement dynamique des obstacles et la surveillance environnementale en temps réel, améliorant ainsi la précision et la vitesse de réponse des opérations du robot ;
- La conception multi-interfaces réduit les coûts de commutation et d'extension externes, accélère l'intégration du système et les cycles de débogage ;
- La large plage de températures et de pressions, ainsi que sa structure robuste, garantissent un fonctionnement stable et durable du robot dans des scénarios tels que la lutte contre les incendies, l'inspection et les AGV extérieurs, réduisant ainsi la fréquence de maintenance.

L'APQ TAC-3000 Pro n'est pas qu'un simple contrôleur matériel ; c'est une véritable plateforme de capacités pour l'intelligence robotique et le développement de scénarios multiples. Grâce à sa puissance de calcul élevée, son évolutivité flexible et sa fiabilité industrielle, elle permet aux robots de fonctionner de manière stable et efficace dans des environnements complexes, aidant ainsi les entreprises à accélérer la transition de leurs robots, du stade de la mobilité à celui de l'intelligence, et des essais ponctuels au déploiement à grande échelle.
Date de publication : 25 décembre 2025