
Tsjin 'e eftergrûn fan 'e wrâldwide weach fan belichaamde yntelliginsje binne de prestaasjes fan robotkontrollers in wichtige bepalende faktor wurden fan har yntelliginsjenivo.De KiWiBot-searje fan belichaamde yntelliginte robotkontrollers fan APQbiedt baanbrekkende oplossingen foar hege-presyzje bewegingskontrôle troch ynnovativehúshâldlik ûntwerp en in gearwurkjende kontrôle-arsjitektuer fan "grut-harsens-lyts-harsens".

01.
Technologyske iteraasje: dûbele trochbraken yn folume en prestaasjes
Belichaamde robots stelle strange easken oan kontrôlers, ynklusyfkompakte grutte, hege prestaasjes, hege yntegraasje, hege stabiliteit, hege real-time kapasiteit, en leech lûdDe APQ KiWiBot-searje controllers hat, troch trije generaasjes fan technologyske evolúsje, stadichoan de pinepunten fan tradisjonele controllers oanpakt:
Detwadde generaasje controllerbout fierder op 'e X86+Orin-arsjitektuer, en biedt foardielen lykasferskate modellen, fleksibele seleksje, sterke skalberberens en kompakte grutte.
Detredde generaasje controlleroptimalisearret fierder de algemiene prestaasjes, mei ferbiningen dy't inoplossing foar autobedrading, wêrtroch't de betrouberens signifikant ferbettere wurdt.

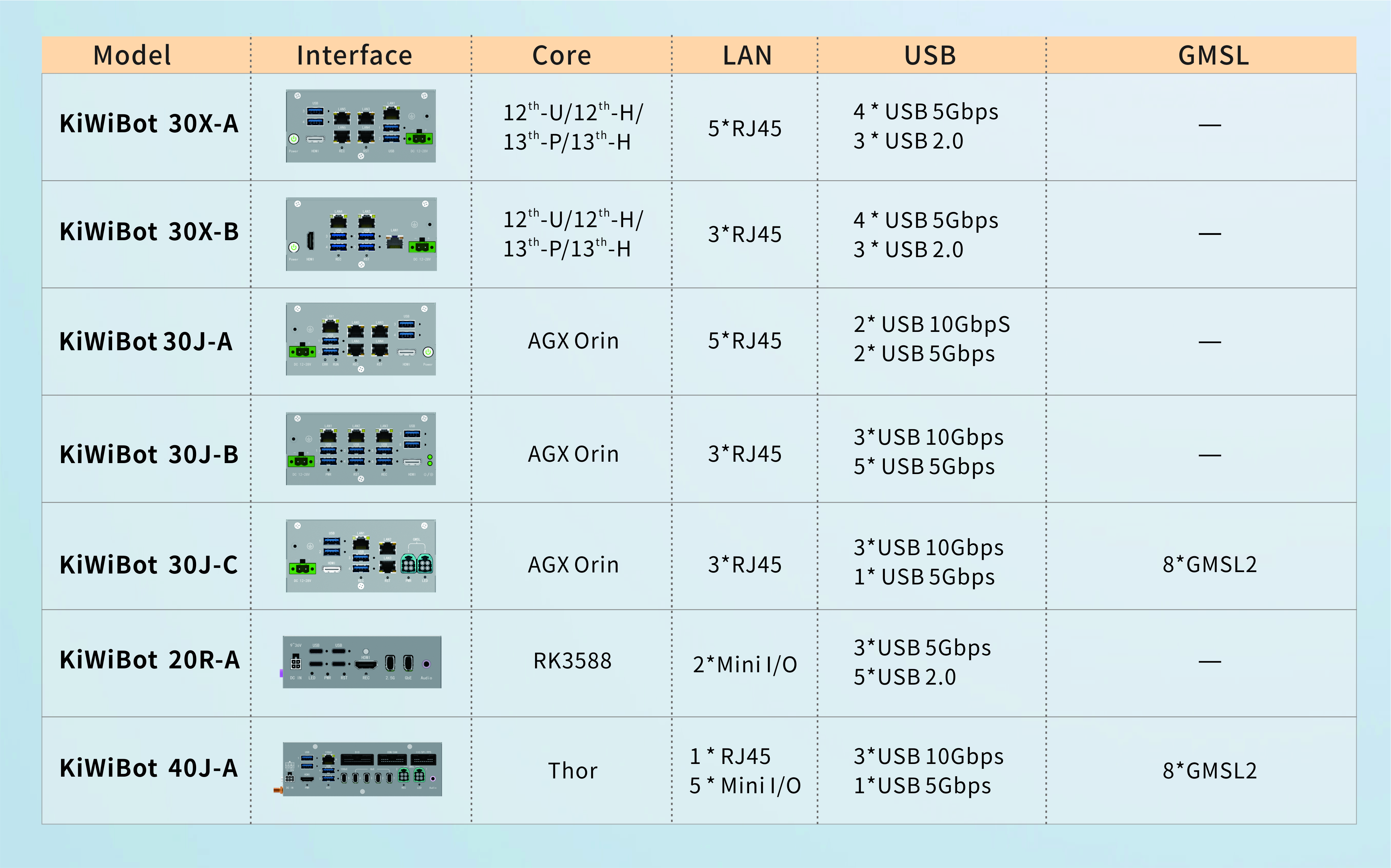
"Core Cerebellum and Cerebrum" controller Model oanbefelling
02.
Fjouwer ynstallaasjemodi: fleksibel om oan te passen oan ferskate senario's
De controller biedt fjouwer ynstallaasjemethoden om optimale oanpasberens te garandearjen foar ferskate tapassingsscenario's.
●Shell-monteare ynstallaasjeFerbetteret strukturele sterkte en ynfloedresistinsje, en ferbetteret de prestaasjes fan miljeubeskerming
●Shell-frije ynstallaasjeIdeale palmgrutte ôfmjittings, trijefâldich koelsysteem soarget foar stille en stabile operaasje
●Side-by-side ynstallaasje: Rûge struktuer, maklik ûnderhâld
●Stapelde ynstallaasjeHeech yntegreare, romtebesparend, geskikt foar romtebeheinde senario's
De hiele searje brûkt in ûntwerp fan yndustrieel nivo, mei poerbêste oanpassingsfermogen oan it miljeu en fleksibele skalberens.

03.
Kearnfoardiel: Fersterkjen fan presyzjebewegingskontrôle
De kearnfoardielen fan dizze controller lizze yn syn útsûnderlikereal-timeprestaasjes en krektetiidsynchronisaasjemooglikheden, en leverje krityske stipe foar bewegingskontrôle mei hege presyzje. Oft ynmobile robotika, yndustriële automatisearring, of spesjalisearre tapassingen, it soarget foar stabile en betroubere operasjonele prestaasjes.
It hat robuusteelektromagnetyske kompatibiliteit (EMC)enanty-ynterferinsjemooglikheden, kombinearre mei poerbêste trillingsbestriding, soarget foar stabile operaasje yn komplekse elektromagnetyske omjouwings. It modulêre ûntwerp makket ûnôfhinklik funksjonearjen fan elke komponint mooglik, wêrtroch't de betrouberens en ûnderhâldberens fan it systeem signifikant ferbettere wurdt.

Wylst de robotika-yndustry foarútgiet nei hegere presyzje en gruttere fleksibiliteit, ûndergiet de bewegingskontrôle-arsjitektuer in wichtige evolúsje fan sintralisearre ferwurking nei ferspraat gearwurking. De APQ KiWiBot-controller, troch húshâldlik ûntwerp en ynnovative "grutte en lytse harsens" gearwurkingsarsjitektuer, pakt net allinich de útdagings fan hege-presyzje kontrôle oan, mar biedt de yndustry ek in selsstannige en kontrolearbere technyske basis, wêrtroch in nij technologysk paad foar Sina yn 'e wrâldwide konkurrinsje op it mêd fan belichaamde yntelliginsje leit.
Pleatsingstiid: 14 novimber 2025