- Мониторинг ва таҳлили вақти воқеӣ дар дастгоҳҳо
- Системаи амалиётии пуриқтидори вуруд/хуруҷ ва вақти воқеӣ ROS2 омода аст
- Хизматрасониҳои коммуникатсионии додаҳо барои экосистемаи канории зеҳни сунъӣ заруранд

Мавридҳои татбиқи роботҳои логистикии анбор

Контроллери саноати дорои қувваи ками баландсифат

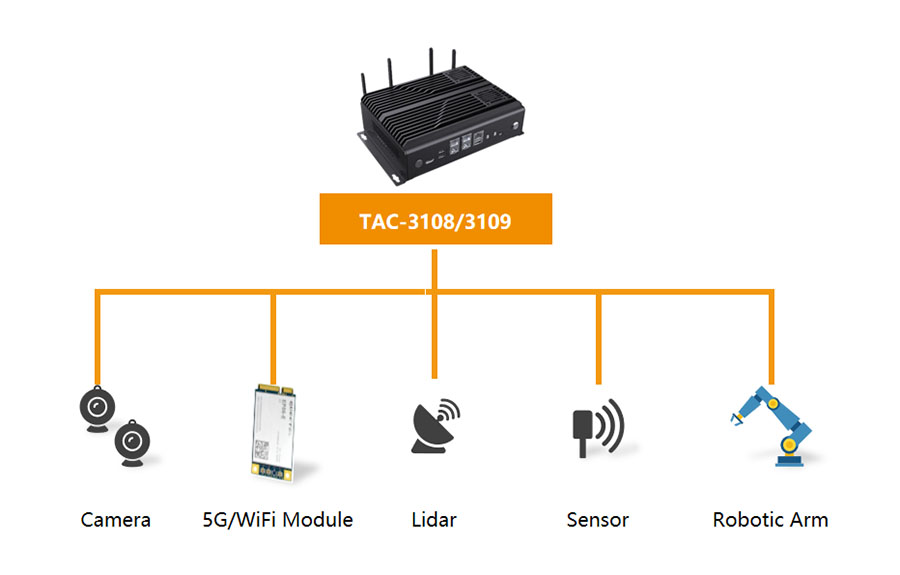
TAC-3108/3109
- Дарунсохти NVIDIA Jetson AGX Orin SoM


Модули бесим
- WiFi 6 ва BT 5.2
Иҷрои зеҳни сунъии миқёспазир, то 275TOPs
- Қабули технологияи навтарини NVIDIA Jetson AGX Orin SoM
- Самаранокӣ нисбат ба насли қаблии AGX Xavier 8 маротиба баландтар аст.
- GPU NVIDIA Ampere, 2048 ядрои NVIDIA CUDA, 64 ядрои тензор
Слотҳои вуруд/хуруҷи бисёрфунксионалӣ ва васеъкунӣ барои пайвастшавӣ ба дастгоҳҳо
- 3xUSB3.0, 5xGbE, COM, CANBus, DI/O
- WiFi-ро дастгирӣ мекунад ва интиқоли маълумоти ултра-баландсуръати 5G-ро тавассути M.2 дастгирӣ мекунад
Системаи зудтари ҷойгиркунии зеҳни сунъӣ
- Системаи пешакӣ насбшудаи Ubuntu 20.04, аз ҷумла JetPack 5.02 SDK
- Маҷмӯаҳои ROS2 ва Edge AI барои барномаҳои роботӣ
Мавридҳои татбиқи роботҳои логистикии анбор
Мушкилоти татбиқ
- Талабот барои иҷрои баланди компютерӣ ва иҷрои бисёрвазифагӣ
- Интиқоли маълумот бо суръати баланд барои мониторинг ва таҳлили маълумот дар вақти воқеӣ
- Истифодаи муҳити динамикӣ зарур аст
Ҳалли
- Таъмини иҷрои зеҳни сунъӣ то 275TOPS
- Барои пайваст кардани якчанд дастгоҳ интерфейси универсалии вуруд/хуруҷро таъмин кунед
- Ҳарорати васеи корӣ (-20~60 ℃), мутобиқи стандартҳои саноати вазнин
Афзалиятҳои нақша
- Ҷойгиркунии зуди зеҳни сунъӣ, ки бо Ubuntu 20.04, маҷмӯи ROS2 ва NVIDIA JetPack SDK пешакӣ насб карда шудааст
- Тарҳи саноатии пойдор барои кори устувор дар муҳитҳои сахт
- Дастгирии ғании вуруд/хуруҷ барои пайвасти камераҳои баландсифат, муоширати протоколи саноатӣ ва пайвасти бесим