
Dünýäde beden taýdan döredilen aň-paýhas tolkunynyň fonunda robot dolandyryjylarynyň işi olaryň aň-paýhas derejesiniň esasy kesgitleýjisine öwrüldi.APQ-dan döredilen KiWiBot intellektual robot kontrollerleriniň seriýasyinnowasion usullar arkaly ýokary takyklykly hereketi dolandyrmak üçin täze çözgütleri hödürleýäröý dizaýny we "uly-beýni-kiçi-beýni" bilelikdäki dolandyryş arhitekturasy.

01.
Tehnologiýanyň gaýtalanmagy: Göwrüm we öndürijilik babatda iki gezek öňegidişlikler
Robotlaryň beden gurluşy kontrollerlere berk talaplar goýýar, şol sandakiçi ölçegli, ýokary öndürijilikli, ýokary integrasiýaly, ýokary durnuklylykly, ýokary real wagt mümkinçiligi we pes sesliAPQ KiWiBot kontrollerleriniň seriýasy, tehnologiýanyň üç nesliniň dowamynda, däp bolan kontrollerleriň kynçylyklaryny kem-kemden çözdi:
Theikinji nesil kontrollerýaly artykmaçlyklary hödürleýän X86+Orin arhitekturasyna esaslanýardürli modeller, çeýe saýlama, güýçli ölçekleniş mümkinçiligi we ykjam ölçegler.
Theüçünji nesil kontrollerumumy öndürijiligi has-da optimizirleýär, birleşdirijiler bolsa ... ulanýarlarawtoulag simlerini birikdirýän toplumyň çözgüdi, ygtybarlylygy ep-esli ýokarlandyrýar.

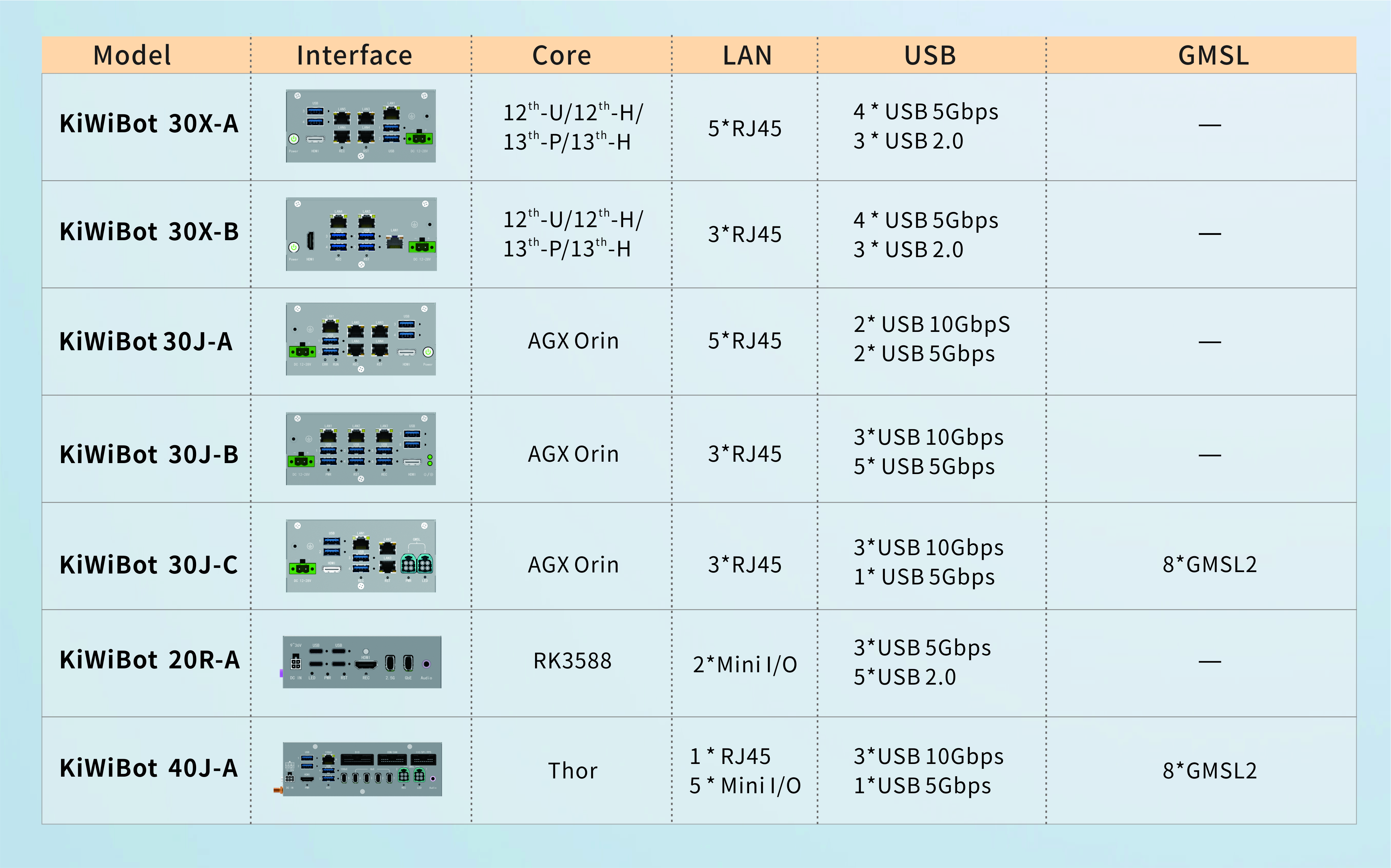
"Core Cerebellum and Cerebrum" kontrolleri Model teklibi
02.
Dört gurnama režimi: dürli senariýalara uýgunlaşmak üçin çeýe
Kontroller dürli programma senariýalarynda iň gowy uýgunlaşmany üpjün etmek üçin dört gurnama usulyny hödürleýär.
●Gabykly gurnamaGurluşyň berkligini we zarba garşylygyny güýçlendirýär, daşky gurşawy goramak işini gowulandyrýar
●Gabyksyz gurnamaIdeal elli pelme ölçegleri, üçlü sowadyş ulgamy sessiz we durnukly işlemegi üpjün edýär
●Ýan-ýana gurnama: Berk gurluş, aňsat tehniki hyzmat
●Üst-üst gurnamaÝokary derejede integrasiýa edilen, ýer tygşytlaýjy, ýer çäkli bolan ýagdaýlar üçin amatly
Bütin seriýa senagat derejeli dizaýny kabul edýär, ajaýyp daşky gurşawa uýgunlaşmagy we çeýe ölçeklenmegi bilen tapawutlanýar.

03.
Esasy artykmaçlyk: Hereketiň takyk dolandyrylyşyny güýçlendirmek
Bu kontrolleriň esasy artykmaçlyklary onuň ajaýyplygyndadyrhakyky wagtöndürijilik we takyklykwagt sinhronizasiýaýokary takyklykly hereket gözegçiligi üçin möhüm goldaw berýän mümkinçilikler. Içinde bolsa-damobil robototehnika, senagat awtomatlaşdyrmasy ýa-da ýöriteleşdirilen programmalar, ol durnukly we ygtybarly iş görkezijilerini üpjün edýär.
Ol berkligi bilen öwünýärelektromagnit utgaşyklylyk (EMC)wepäsgelçiliklere garşy ukyplarajaýyp titreme garşylygy bilen utgaşdyrylyp, çylşyrymly elektromagnit gurşawlarda durnukly işlemegi üpjün edýär. Modul dizaýny her bir komponentiň garaşsyz işlemegini üpjün edýär, ulgamyň ygtybarlylygyny we tehniki taýdan hyzmat edilmegini ep-esli ýokarlandyrýar.

Robot senagaty has ýokary takyklyga we has uly çeýelige tarap öňe gidýän mahaly, hereketi dolandyrmak arhitekturasy merkezi işlemeden paýlanan hyzmatdaşlyga çenli uly ösüşe eýe bolýar. APQ KiWiBot kontrolleri, içerki dizaýn we innowasion "uly we kiçi beýni" hyzmatdaşlyk arhitekturasy arkaly diňe bir ýokary takyklykly dolandyryşyň kynçylyklaryny çözmän, eýsem pudaga özbaşdak we dolandyrylyp bilinýän tehniki binýady üpjün edýär we Hytaýyň global intellekt bäsleşiginde täze tehnologik ýoluny açýar.
Ýerleşdirilen wagty: 2025-nji ýylyň 14-nji noýabry