
ท่ามกลางกระแสความนิยมของปัญญาประดิษฐ์ที่ฝังอยู่ในร่างกายทั่วโลก ประสิทธิภาพของตัวควบคุมหุ่นยนต์จึงกลายเป็นปัจจัยสำคัญในการกำหนดระดับความฉลาดของหุ่นยนต์เหล่านั้นหุ่นยนต์ควบคุมอัจฉริยะแบบมีตัวตนในซีรีส์ KiWiBot จาก APQนำเสนอโซลูชันที่ล้ำสมัยสำหรับการควบคุมการเคลื่อนไหวที่มีความแม่นยำสูงผ่านนวัตกรรมใหม่การออกแบบภายในประเทศและสถาปัตยกรรมควบคุมการทำงานร่วมกันแบบ "สมองใหญ่-สมองเล็ก".

01.
การพัฒนาทางเทคโนโลยีอย่างต่อเนื่อง: ความก้าวหน้าครั้งสำคัญสองด้าน ทั้งปริมาณและประสิทธิภาพ
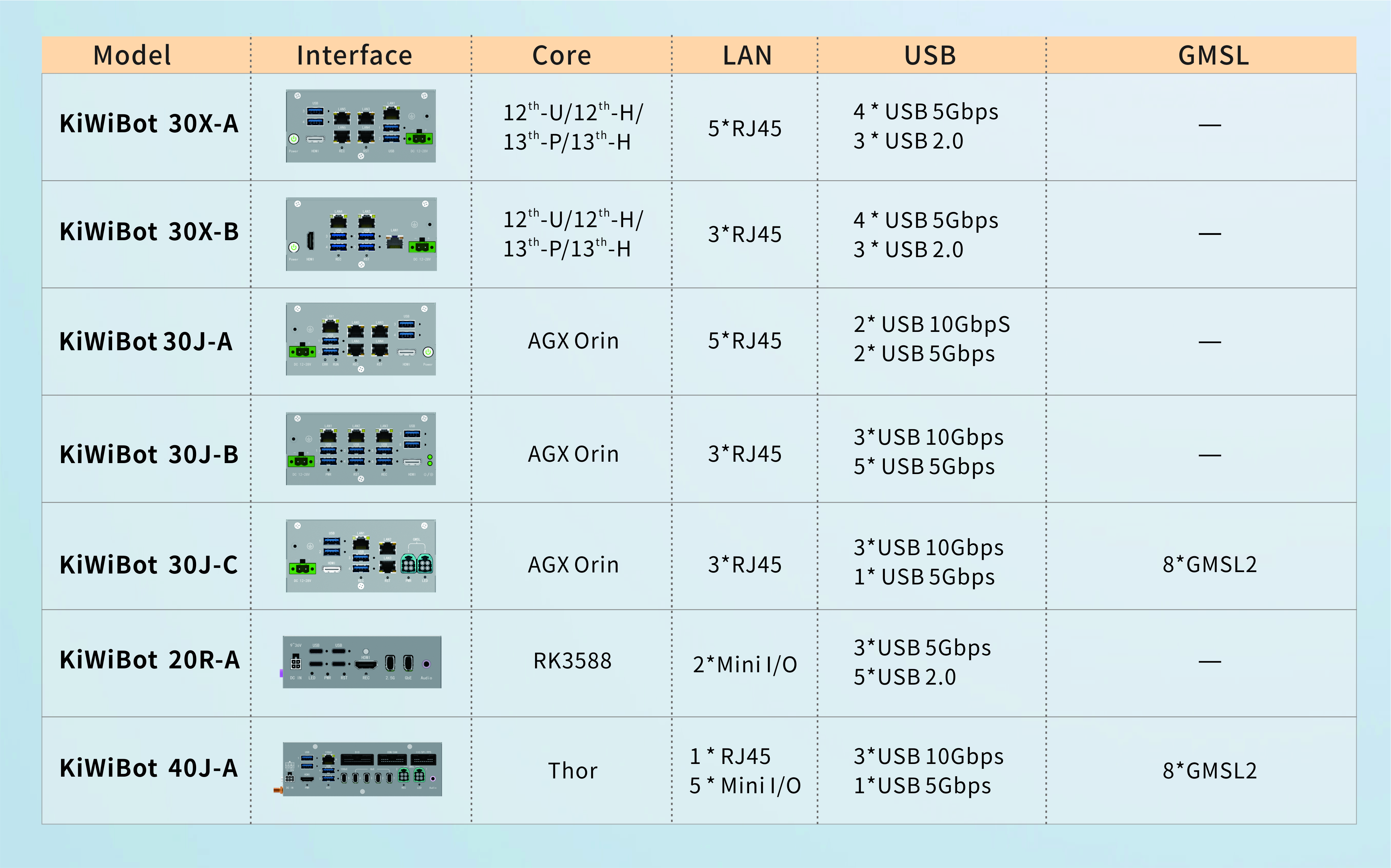
หุ่นยนต์ที่มีร่างกายกำหนดข้อกำหนดที่เข้มงวดสำหรับตัวควบคุม ซึ่งรวมถึงขนาดกะทัดรัด ประสิทธิภาพสูง การรวมระบบสูง ความเสถียรสูง ความสามารถในการทำงานแบบเรียลไทม์สูง และเสียงรบกวนต่ำคอนโทรลเลอร์ซีรีส์ APQ KiWiBot ผ่านการพัฒนาทางเทคโนโลยีมาสามรุ่น ได้ค่อยๆ แก้ไขปัญหาที่พบในคอนโทรลเลอร์แบบดั้งเดิม:
เดอะตัวควบคุมรุ่นที่สองพัฒนาต่อยอดจากสถาปัตยกรรม X86+Orin ซึ่งมีข้อดีหลายประการ เช่นมีรุ่นให้เลือกหลากหลาย ตัวเลือกที่ยืดหยุ่น ความสามารถในการขยายขนาดที่แข็งแกร่ง และขนาดกะทัดรัด.
เดอะตัวควบคุมรุ่นที่สามช่วยเพิ่มประสิทธิภาพโดยรวมให้ดียิ่งขึ้น ด้วยการใช้ตัวเชื่อมต่อที่ปรับปรุงใหม่โซลูชันชุดสายไฟรถยนต์ซึ่งช่วยเพิ่มความน่าเชื่อถือได้อย่างมาก

คำแนะนำแบบจำลองตัวควบคุม "แกนกลางสมองน้อยและสมองใหญ่"
02.
มีโหมดการติดตั้งสี่แบบ: ยืดหยุ่น ปรับให้เข้ากับสถานการณ์ต่างๆ ได้
ตัวควบคุมนี้มีวิธีการติดตั้งสี่วิธีเพื่อให้มั่นใจได้ถึงความสามารถในการปรับตัวให้เหมาะสมกับสถานการณ์การใช้งานที่หลากหลาย
●การติดตั้งบนเปลือกหุ้ม: เสริมความแข็งแรงของโครงสร้างและทนทานต่อแรงกระแทก ปรับปรุงประสิทธิภาพการปกป้องสิ่งแวดล้อม
●การติดตั้งแบบไม่ต้องใช้ฝาครอบขนาดกะทัดรัดพอดีมือ ระบบระบายความร้อนสามชั้นช่วยให้การทำงานเงียบและเสถียร
●การติดตั้งแบบเคียงข้างกันโครงสร้างแข็งแรง ทนทาน บำรุงรักษาง่าย
●การติดตั้งแบบเรียงซ้อน: ผสานรวมฟังก์ชันการทำงานได้อย่างลงตัว ประหยัดพื้นที่ เหมาะสำหรับสถานการณ์ที่มีพื้นที่จำกัด
ผลิตภัณฑ์ในซีรีส์นี้ทั้งหมดได้รับการออกแบบในระดับอุตสาหกรรม โดดเด่นด้วยความสามารถในการปรับตัวเข้ากับสภาพแวดล้อมได้อย่างยอดเยี่ยม และความสามารถในการปรับขนาดที่ยืดหยุ่น

03.
ข้อได้เปรียบหลัก: เสริมศักยภาพการควบคุมการเคลื่อนไหวที่แม่นยำ
ข้อได้เปรียบหลักของคอนโทรลเลอร์นี้อยู่ที่ประสิทธิภาพที่ยอดเยี่ยมเรียลไทม์ประสิทธิภาพและความแม่นยำการซิงโครไนซ์เวลาความสามารถต่างๆ ที่ให้การสนับสนุนที่สำคัญสำหรับการควบคุมการเคลื่อนไหวที่มีความแม่นยำสูง ไม่ว่าจะเป็นในหุ่นยนต์เคลื่อนที่ ระบบอัตโนมัติทางอุตสาหกรรม หรือแอปพลิเคชันเฉพาะทางซึ่งช่วยให้การดำเนินงานมีเสถียรภาพและเชื่อถือได้
มันมีคุณสมบัติที่แข็งแกร่งความเข้ากันได้ทางแม่เหล็กไฟฟ้า (EMC)และความสามารถในการป้องกันการรบกวนเมื่อรวมกับคุณสมบัติต้านทานการสั่นสะเทือนที่ดีเยี่ยม จึงมั่นใจได้ถึงการทำงานที่เสถียรในสภาพแวดล้อมทางแม่เหล็กไฟฟ้าที่ซับซ้อน การออกแบบแบบโมดูลาร์ช่วยให้แต่ละส่วนประกอบทำงานได้อย่างอิสระ ซึ่งช่วยเพิ่มความน่าเชื่อถือและบำรุงรักษาระบบได้อย่างมาก

เนื่องจากอุตสาหกรรมหุ่นยนต์ก้าวหน้าไปสู่ความแม่นยำและความยืดหยุ่นที่สูงขึ้น สถาปัตยกรรมควบคุมการเคลื่อนไหวจึงกำลังเปลี่ยนแปลงไปอย่างมาก จากการประมวลผลแบบรวมศูนย์ไปสู่การทำงานร่วมกันแบบกระจายศูนย์ ตัวควบคุม APQ KiWiBot ด้วยการออกแบบภายในประเทศและสถาปัตยกรรมความร่วมมือแบบ "สมองใหญ่และสมองเล็ก" ที่ล้ำสมัย ไม่เพียงแต่จะแก้ไขความท้าทายของการควบคุมที่มีความแม่นยำสูงเท่านั้น แต่ยังมอบรากฐานทางเทคนิคที่พึ่งพาตนเองได้และควบคุมได้ให้กับอุตสาหกรรม ปูทางสู่เส้นทางเทคโนโลยีใหม่ให้กับจีนในการแข่งขันด้านปัญญาประดิษฐ์ในระดับโลก
วันที่เผยแพร่: 14 พฤศจิกายน 2025