![[Případová studie z oboru] Vývojový cyklus bipedálního humanoidního robota zkrácen o 40 %! Jak přední integrátoři dosahují rychlých průlomů s řešením APQ pro „mozeček a mozeček“](/style/global/img/img_45.jpg)
Od října 2025 do ledna 2026 úzce spolupracoval přední domácí integrátor humanoidních robotů se společností APQ. Na základě kolaborativní architektury AGX Orin + Intel „cerebrum and cerebellum“ dokončili vývoj a ladění prototypu bipedálního humanoidního robota nové generace.pouhé čtyři měsíce, což zkracuje celkový vývojový cyklus o 40 % ve srovnání s tradičními metodami.
01
Zákaznické zkušenosti a klíčové výzvy
Profil zákazníka
Přední domácí podnik ve výzkumu a integraci bipedálních humanoidních robotů se zaměřením na oblast špičkových bionických robotů s produkty pokrývajícími různé scénáře, jako je vědecký výzkum a vzdělávání, speciální operace a komerční služby.
Hlavní bod bolesti
- Dlouhý vývojový cyklus:V tradičních řešeních jsou moduly jako řízení pohybu, vnímání prostředí a plánování rozhodování dodávány různými dodavateli a ladění integrace trvá až 8–12 měsíců.
- Obtíže ve spolupráci se systémem:Dvounozí roboti potřebují k dosažení spolupráce na milisekundové úrovni „mozek“ (rozhodování) a „mozeček“ (řízení) a tradiční separační architektura jen obtížně podporuje efektivní interakci mezi rovnováhou v reálném čase a multimodálním vědomím.
- Vysoké náklady na migraci algoritmů:Migrace a optimalizace algoritmů ze simulace do reálného stroje často vyžaduje opakované přizpůsobení různým hardwarovým rozhraním, což zpomaluje celkový pokrok.
02
Řešení APQ
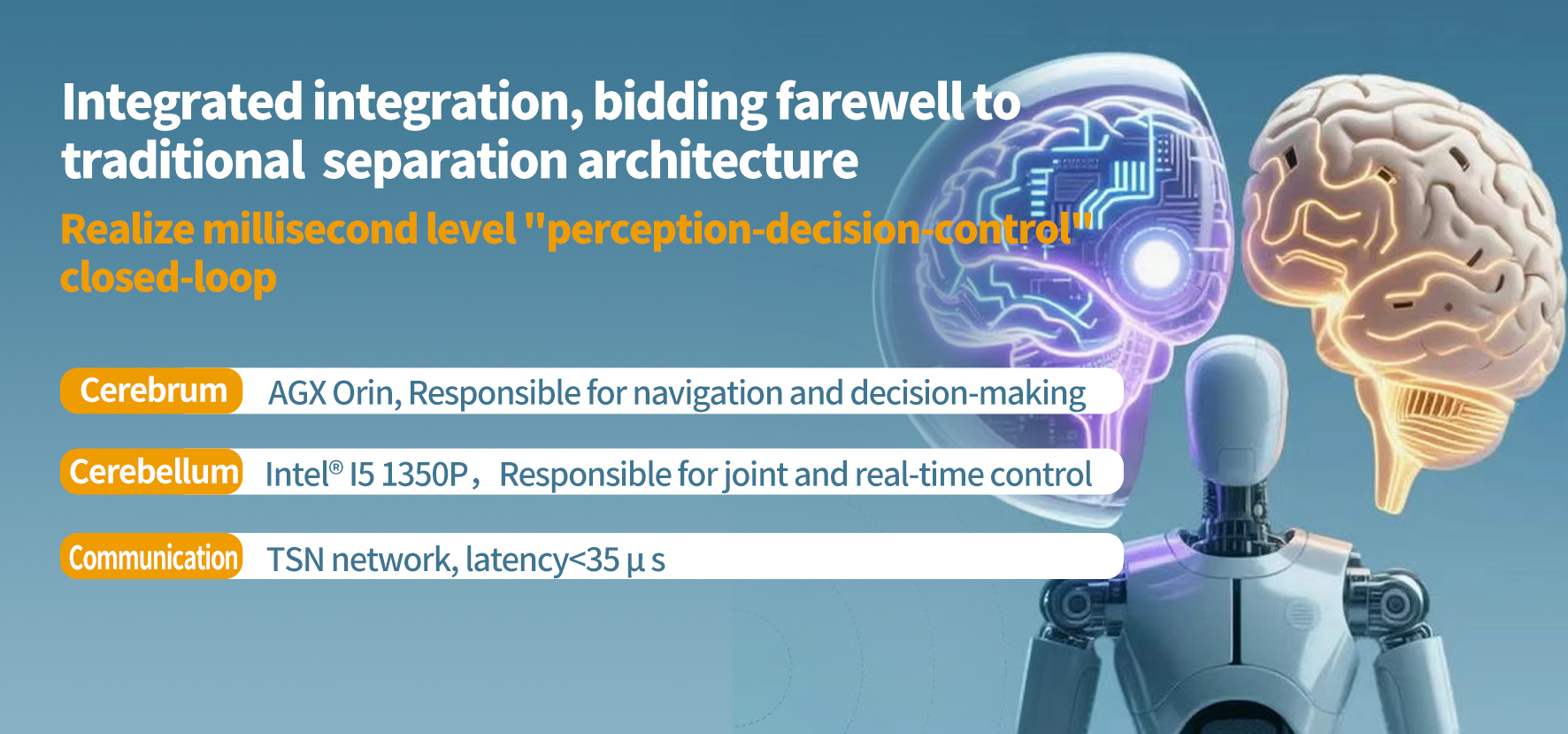
AGX Orin+Intelmozek a mozeček" Kolaborativní architektura
1. Fáze návrhu schématu (říjen 2025)
Zarovnání požadavků:
Společně prověřit 13 základních požadavků, včetně frekvence řízení chůze v reálném čase ≥ 1 kHz, přesnosti synchronizace více senzorů ≤ 40 μs, podpory pro ROS 2 a vlastní middleware s duálním režimem atd.
Přizpůsobení schématu:
- Hlavní řídicí vrstva využívá AGX Orin+Intelmozek a mozečekfúzní řídicí jednotka, integrující vysoce výkonnou rozhodovací jednotku x86 a řídicí jednotku v reálném čase, dosahující integrace „vnímání-rozhodování-řízení“.
- Nasaďte Intel I5 1350P jako společný koprocesor v prováděcí vrstvě, který bude zodpovědný za řízení serv a lokální adaptivní nastavení 28 kloubů.
- Komunikace je založena na gigabitové TSN (Time Sensitive Network), což zajišťuje, že latence mezi AGX Orin a mozečkem x86 je menší než 35 μs.
2. Fáze rychlého nasazení (listopad–prosinec 2025)
- Hardwarové připojení a přehrávání:Standardní elektrická rozhraní se přímo přizpůsobují stávajícím servopohonům a senzorům zákazníků, čímž se zkracuje doba potřebná k přizpůsobení kabeláže.
- Software připravený k použití ihned po vybalení z krabice:Předinstalované systémy Ubuntu 22.04 a ROS 2, vestavěný základní funkční balíček bipedálního robota, zákazníci mohou dokončit základní konfiguraci pohybu do 3 dnů.
- Efektivní kolaborativní ladění:APQ poskytuje podporu „na místě i na dálku“ prostřednictvím dvou linek pro rychlé řešení problémů, jako je kalibrace senzorů, což výrazně zkracuje dobu ladění na místě.
03
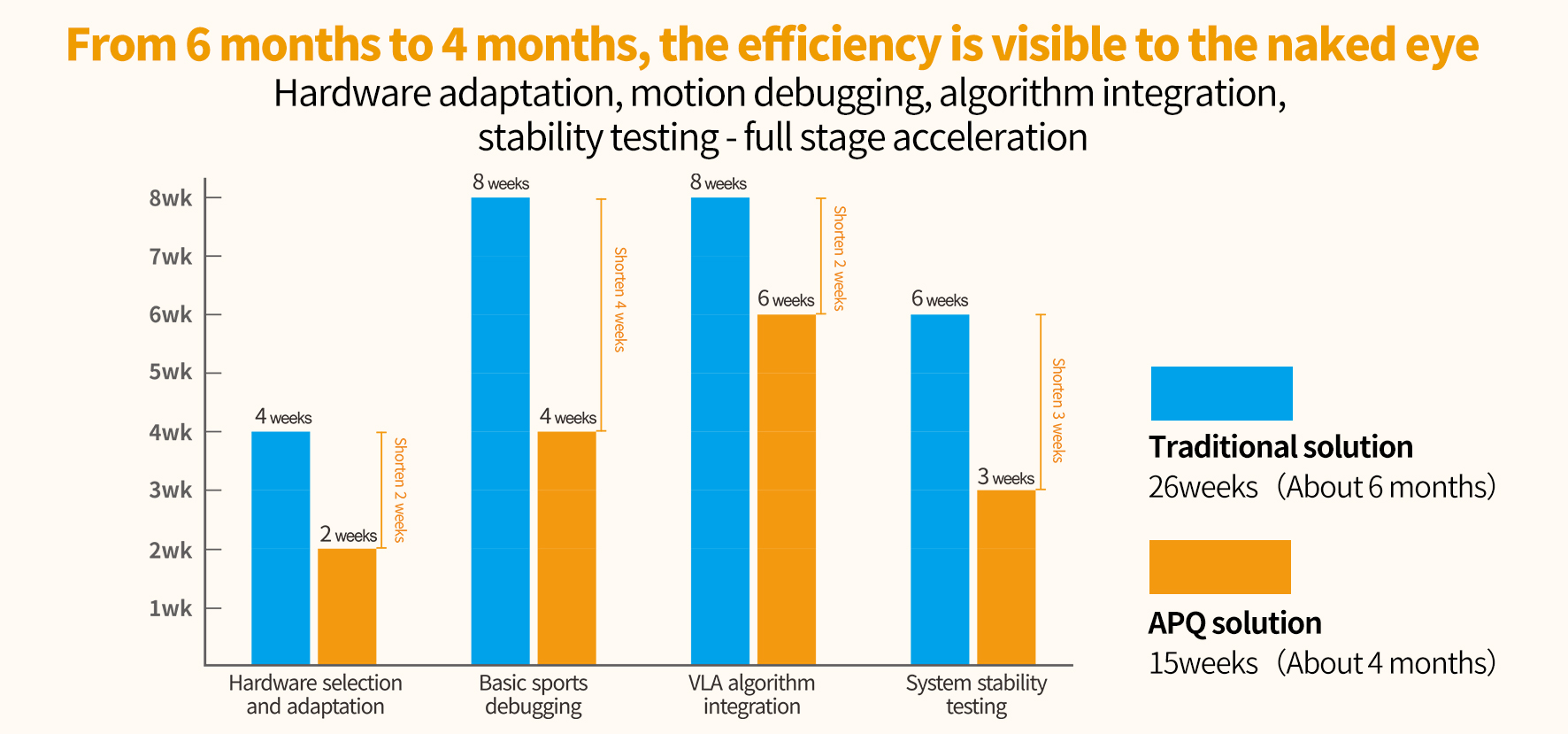
Klíčový úspěch: Vývojový cyklus zkrácen o 40 %
Porovnání časových harmonogramů vývoje
Významné zlepšení výkonu
- Ovládání v reálném čase:Cyklus řízení chůze byl prodloužen z 5 ms na 1 ms a rychlost odezvy dynamické rovnováhy byla zvýšena o 80 %.
- Efektivita vývoje:Rychlost iterací algoritmu se zlepšila a zákazníci mohou dokončit simulační ověření nové chůze na reálném stroji do 7 dnů (tradičně to trvá 20 dnů).
- Stabilita systému:Nepřetržitý 72hodinový zátěžový test bez poruch, MTBF (průměrná doba mezi poruchami) se zvýšila na 1000 hodin.
04
Zpětná vazba od zákazníků a poznatky z oboru
Hodnocení technického ředitele zákazníka
APQmozek a mozeček„architektura skutečně řeší problematická místa vývoje robotů. AGX Orin nám umožňuje rychle spouštět složité navigační algoritmy, zatímco mozeček od Intelu zajišťuje řízení na úrovni kloubů v reálném čase. Standardizovaná rozhraní nám umožňují odpoutat se od vývoje ovladačů na nízké úrovni a více se zaměřit na inovaci algoritmů na vyšší úrovni.“
Postřehy z oboru
1. Integrovaný design se stává trendem:"mozek„a „mozeček“ musí úzce spolupracovat a oddělená architektura se stala úzkým hrdlem efektivity.
2. Standardizace vytváří hodnotu:Standardizace hardwarových rozhraní a softwarového middlewaru může výrazně snížit složitost integrace.
3. Nový model ekologické spolupráce:Dodavatelé by se měli transformovat v „partnery pro řešení“ a intenzivně se podílet na raném rozvoji zákazníků.
05
Hlavní výhody řešení APQ
Technická výhoda
- Fúzní architektura: AGX Orin+Intelmozek a mozečekdosáhnout jednotného rozhodování a řízení hardwaru a vyhnout se tak úzkým hrdlům datové sběrnice.
- Elastická expanze: Podporuje různé konfigurace od 12 do 32 kloubů a mozečkový výkon lze upgradovat na I7 13700H.
- Otevřený ekosystém: plně kompatibilní s běžnými vývojovými prostředími, jako jsou ROS 2, MATLAB/Simulink atd.
Výhody služby
- Komplexní spolupráce: poskytování společných vývojových služeb od návrhu řešení až po podporu hromadné výroby.
- Sdílení zkušeností: Na základě úspěšných zkušeností s vývojem více než 50 klientů s roboty jim pomáháme s rychlým pokrokem.
- Rychlá odezva: 7 × 24hodinová vzdálená diagnostika + 48hodinová podpora na místě pro zajištění hladké realizace projektu.

V dnešní zrychlující se industrializaci robotiky se efektivita vývoje stala klíčem ke konkurenci. Prostřednictvím kolaborativní architektury „mozek a mozeček„a rozsáhlé služby, APQ nejen pomáhá zákazníkům dosáhnout 40% zkrácení vývojových cyklů, ale také ověřuje důležitou hodnotu integrovaného návrhu v komplexních robotických systémech. Těšíme se na spolupráci s dalšími partnery, abychom společně podpořili příchod éry ztělesněné inteligence.“
Pokud máte zájem o naši společnost a produkty, neváhejte kontaktovat našeho zahraničního zástupce Robina.
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
Čas zveřejnění: 9. ledna 2026