
2025年10月から2026年1月にかけて、国内有数のヒューマノイドロボットインテグレーターがAPQと緊密に連携し、AGX Orin + Intelの「大脳と小脳」協調アーキテクチャに基づいて、次世代二足歩行ヒューマノイドロボットのプロトタイプの開発とデバッグを完了しました。わずか4ヶ月で、従来の方法と比較して開発サイクル全体を40%短縮.
01
顧客の背景と主な課題
顧客プロフィール
二足歩行型ヒューマノイドロボットの研究開発および統合における国内有数の企業であり、ハイエンドバイオニックロボット分野に注力し、科学研究・教育、特殊作戦、商業サービスなど、多様なシナリオに対応する製品を提供しています。
根本的な問題点
- 長い開発サイクル:従来のソリューションでは、モーションコントロール、環境認識、意思決定計画などのモジュールは異なるサプライヤーによって提供され、統合デバッグには8~12ヶ月かかる場合がある。
- システム連携の難しさ:二足歩行ロボットは、ミリ秒レベルの協調動作を実現するために「大脳」(意思決定)と「小脳」(制御)を必要としますが、従来の分離型アーキテクチャでは、リアルタイムのバランスとマルチモーダルな認識との間の効率的な相互作用をサポートすることが困難です。
- アルゴリズム移行の高コスト:シミュレーションから実機へのアルゴリズムの移行と最適化には、多くの場合、異なるハードウェアインターフェースへの繰り返し適応が必要となり、全体の進捗を遅らせる。
02
APQソリューション
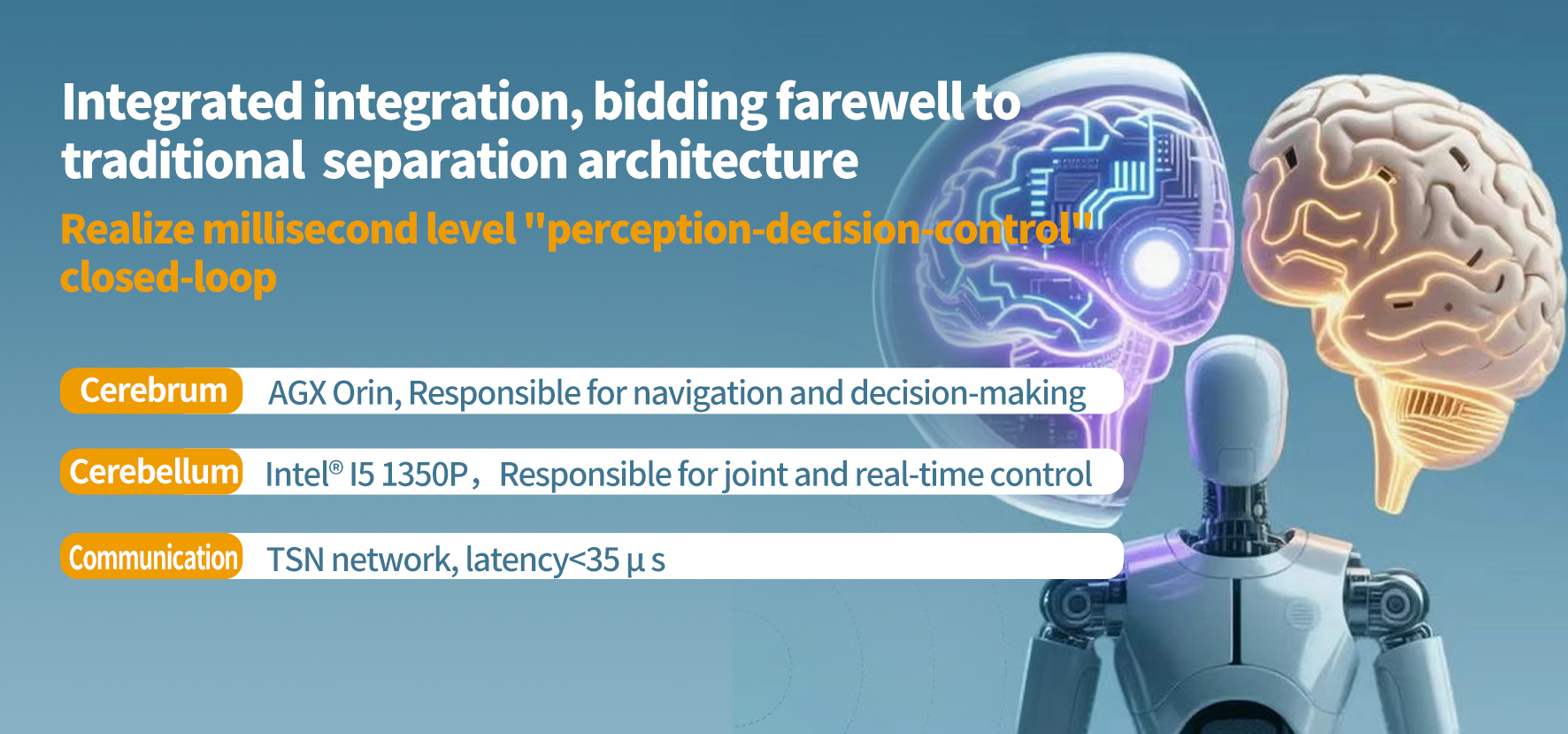
AGX Orin+Intel "大脳と小脳「協働型建築」
1.計画設計段階(2025年10月)
要件の整合性:
リアルタイム歩行制御周波数1kHz以上、マルチセンサー同期精度40μs以下、ROS 2およびカスタムミドルウェアのデュアルモードのサポートなど、13のコア要件を共同でレビューします。
スキームのカスタマイズ:
- メイン制御層はAGX Orin+Intelを採用大脳と小脳x86高性能決定ユニットとリアルタイム制御ユニットを統合した融合コントローラにより、「知覚-決定-制御」の統合を実現します。
- Intel I5 1350Pを、実行層におけるジョイントコプロセッサとして展開し、28個の関節のサーボ制御と局所的な適応調整を担当させる。
- 通信はギガビットTSN(時間感応型ネットワーク)に基づいており、AGX Orinとx86小脳間の遅延が35μs未満であることを保証します。
2.迅速展開フェーズ(2025年11月~12月)
- ハードウェアのプラグアンドプレイ:標準的な電気インターフェースは、顧客が既に所有しているサーボドライブやセンサーに直接適合するため、ケーブルのカスタマイズ時間を短縮できます。
- 箱から出してすぐに使えるソフトウェア:Ubuntu 22.04とROS 2システムがプリインストールされており、二足歩行ロボットの基本機能パッケージが組み込まれているため、お客様は3日以内に基本的な動作設定を完了できます。
- 効率的な共同デバッグ:APQは「オンサイト+リモート」のデュアルラインサポートを提供し、センサーのキャリブレーションなどの問題を迅速に解決することで、オンサイトでのデバッグ時間を大幅に短縮します。
03
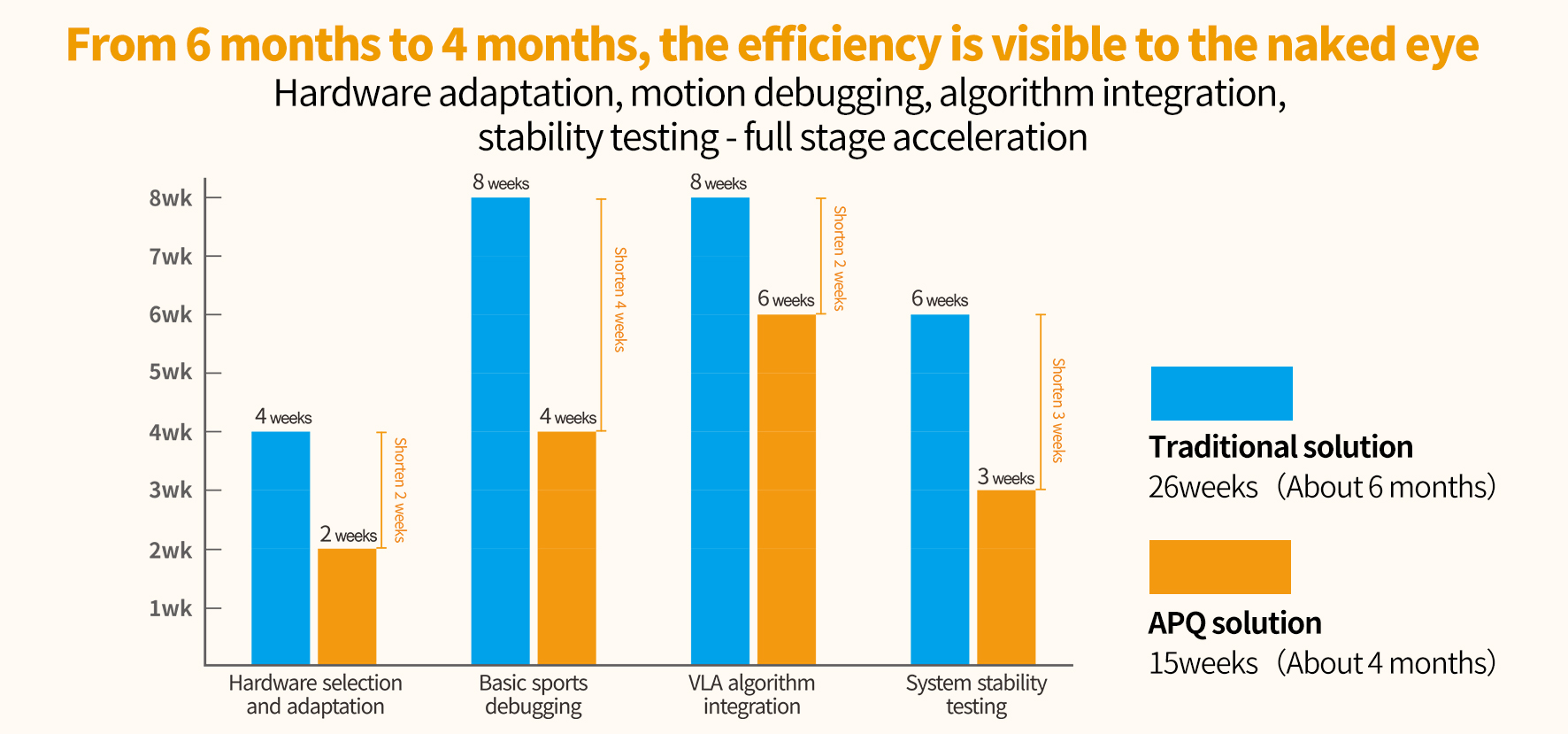
主な成果:開発期間を40%短縮
開発期間の比較
パフォーマンスの大幅な向上
- リアルタイム制御:歩行制御サイクルが5msから1msに延長され、動的バランス応答速度が80%向上しました。
- 開発効率:アルゴリズムの反復速度が向上したことで、顧客は新しい歩行パターンのシミュレーションと実機検証を7日以内に完了できるようになりました(従来は20日かかっていました)。
- システムの安定性:72時間連続負荷試験を実施しましたが、故障は発生せず、MTBF(平均故障間隔)は1000時間に向上しました。
04
顧客からのフィードバックと業界の洞察
顧客技術ディレクター評価
APQの大脳と小脳「このアーキテクチャは、ロボット開発における課題を真に解決します。AGX Orinによって複雑なナビゲーションアルゴリズムを迅速に実行できる一方、IntelのCerebellumはリアルタイムの関節レベル制御を実現します。標準化されたインターフェースにより、低レベルのドライバ開発から脱却し、より高レベルのアルゴリズム革新に注力できるようになります。」
業界インサイト
1. 統合設計がトレンドになりつつある:「大脳「」と「小脳」は密接に連携する必要があり、別々のアーキテクチャは効率のボトルネックとなっている。
2.標準化は価値を生み出す:ハードウェアインターフェースとソフトウェアミドルウェアの標準化は、統合の複雑さを大幅に軽減できる。
3.生態系における新たな協力モデル:サプライヤーは「ソリューションパートナー」へと変貌を遂げ、顧客開拓の初期段階から深く関与すべきである。
05
APQソリューションの主な利点
技術的優位性
- 融合アーキテクチャ:AGX Orin+Intel大脳と小脳データバスのボトルネックを回避し、統一されたハードウェアによる意思決定と制御を実現する。
- 柔軟な拡張性:12関節から32関節までのさまざまな構成をサポートし、小脳の性能はI7 13700Hにアップグレードできます。
- オープンなエコシステム:ROS 2、MATLAB/Simulinkなどの主要な開発環境と完全に互換性があります。
サービスの利点
- フルサイクル・コンパニオンシップ:ソリューション設計から量産サポートまで、共同開発サービスを提供します。
- 経験共有:50社以上のロボット開発クライアントの成功事例に基づき、迅速な開発推進を支援します。
- 迅速な対応:プロジェクトのスムーズな実施を保証するため、7日間×24時間の遠隔診断と48時間のオンサイトサポートを提供します。

今日のロボット産業の急速な発展において、開発効率が競争の鍵となっている。大脳と小脳APQは、高度なサービスと高度なソリューションを提供することで、お客様の開発サイクルを40%短縮するだけでなく、複雑なロボットシステムにおける統合設計の重要な価値を実証しています。今後、より多くのパートナーと協力し、具現化された知能時代の到来を共に推進していくことを楽しみにしています。
弊社および弊社製品にご興味をお持ちでしたら、海外担当者のロビンまでお気軽にご連絡ください。
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
投稿日時:2026年1月9日


