![[Industria Kazo] La Disvolva Ciklo de Dupieda Humanoida Roboto Mallongiĝis je 40%! Kiel Gvidaj Integristoj Atingas Rapidajn Sukcesojn per la Solvo](/style/global/img/img_45.jpg)
De oktobro 2025 ĝis januaro 2026, ĉefa enlanda integrilo de humanoidaj robotoj kunlaboris proksime kun APQ. Bazite sur la kunlabora arkitekturo "cerbo kaj cerebelo" de AGX Orin + Intel, ili kompletigis la disvolvon kaj sencimigon de novgeneracia prototipo de dupieda humanoida roboto ene de...nur kvar monatoj, reduktante la tutan disvolviĝciklon je 40% kompare kun tradiciaj metodoj.
01
Klienta fono kaj kernaj defioj
Klienta Profilo
Gvida hejma entrepreno en la esplorado kaj integrado de dupiedaj humanoidaj robotoj, fokusante sur la kampo de altkvalitaj bionikaj robotoj, kun produktoj kovrantaj multajn scenarojn kiel scienca esplorado kaj edukado, specialaj operacioj kaj komercaj servoj.
Kerna Doloro-Punkto
- Longa evoluiga ciklo:En tradiciaj solvoj, moduloj kiel moviĝregado, media percepto kaj decidplanado estas provizitaj de malsamaj provizantoj, kaj integriĝa sencimigado daŭras ĝis 8-12 monatojn.
- Malfacilaĵoj en sistemkunlaboro:Dupiedaj robotoj bezonas "cerbon" (decidiĝo) kaj "cerebelon" (kontrolo) por atingi kunlaboron je milisekunda nivelo, kaj tradicia apartigarkitekturo malfacilas subteni efikan interagadon inter realtempa ekvilibro kaj multimodala konscio.
- Alta kosto de algoritma migrado:La migrado kaj optimumigo de algoritmoj de simulado al reala maŝino ofte postulas ripetan adaptiĝon al malsamaj aparataraj interfacoj, kio malrapidigas la ĝeneralan progreson.
02
APQ-Solvo
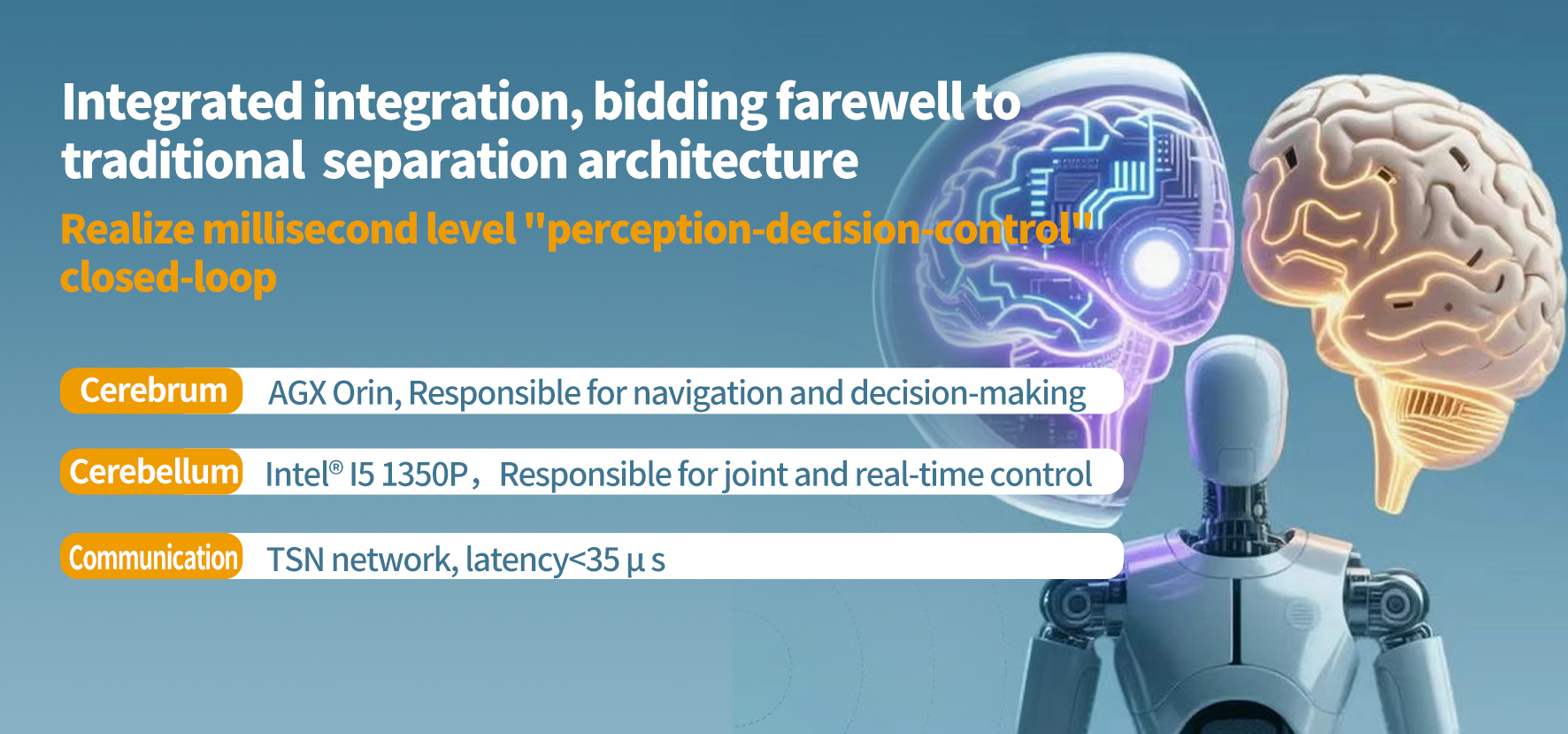
AGX Orin+Intelcerbo kaj cerebelo"Kunlabora Arkitekturo
1. Fazo de la skemo-dezajno (oktobro 2025)
Postulakordigo:
Komune revizii 13 kernajn postulojn, inkluzive de realtempa paŝkontrola frekvenco ≥ 1kHz, plursensila sinkroniga precizeco ≤ 40 μs, subteno por ROS 2 kaj kutima peranto-dureĝima, ktp.
Skema adapto:
- La ĉefa kontrola tavolo adoptas AGX Orin+Intelcerbo kaj cerebelofuzia regilo, integrante x86 alt-efikecan decidunuon kaj realtempan kontrolunuon, atingante la integriĝon de "percepto-decido-kontrolo".
- Deploju Intel I5 1350P kiel artikan kunprocesoron en la ekzekuta tavolo, respondecan pri servoregado kaj loka adapta alĝustigo de 28 artikoj.
- La komunikado baziĝas sur Gigabit TSN (Tempo-Sentema Reto), certigante ke la latenteco inter AGX Orin kaj x86-cerebelo estas malpli ol 35 μs.
2. Rapida deplojfazo (novembro-decembro 2025)
- Aparataro ŝtopu kaj uzu:Normaj elektraj interfacoj rekte adaptiĝas al la ekzistantaj servomotoroj kaj sensiloj de klientoj, reduktante la tempon de kabla adaptado.
- Preta por uzo programaro tuj el la skatolo:antaŭinstalitaj sistemoj Ubuntu 22.04 kaj ROS 2, enkonstruita baza funkcipakaĵo por dupiedaj robotoj, klientoj povas kompletigi bazan moviĝagordon ene de 3 tagoj.
- Efika kunlabora sencimigado:APQ provizas "surlokan+malproksiman" dulinian subtenon por rapide solvi problemojn kiel sensila kalibrado, multe reduktante la surlokan sencimigan tempon.
03
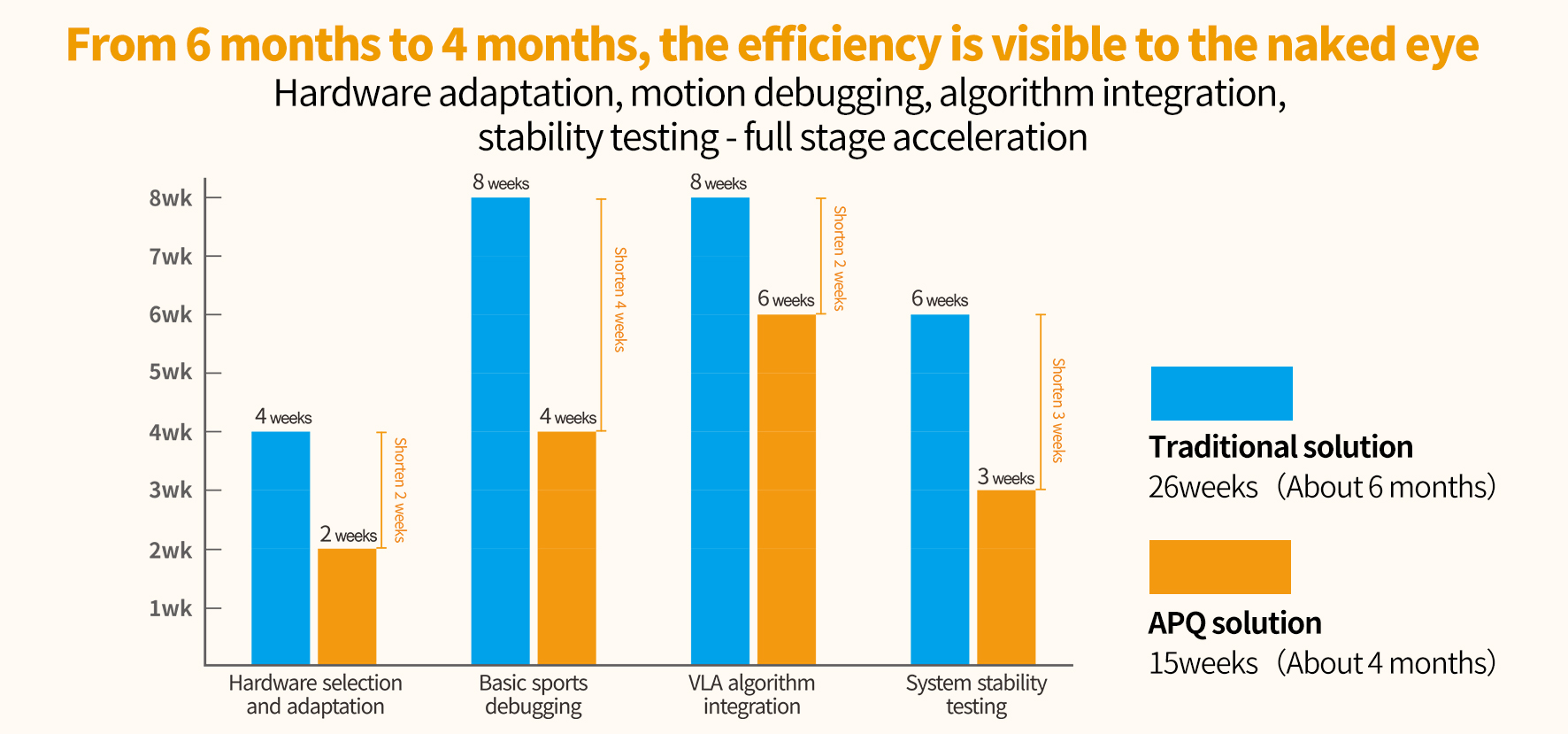
Ĉefa atingo: Evoluiga ciklo mallongigita je 40%
Komparo de Evoluaj Templinioj
Signifa plibonigo de rendimento
- Realtempa kontrolo:La ciklo de paŝado-kontrolo pliiĝis de 5 ms al 1 ms, kaj la rapido de dinamika ekvilibro pliiĝis je 80%.
- Evoluiga efikeco:La iteracia rapido de la algoritmo pliboniĝis, kaj klientoj povas kompletigi la simuladon per reala maŝina konfirmo de la nova paŝado ene de 7 tagoj (tradicie ĝi daŭras 20 tagojn).
- Sistemstabileco:Kontinua 72-hora ŝarĝtesto sen eraroj, MTBF (Meza Tempo Inter Fiaskoj) pliigita al 1000 horoj.
04
Klientaj reagoj kaj industriaj komprenoj
Klienta Teknika Direktoro Takso
APQ-ojcerbo kaj cerebelo"Arkitekturo vere solvas la problemojn de robota disvolviĝo. AGX Orin permesas al ni rapide funkciigi kompleksajn navigaciajn algoritmojn, dum la cerebelo de Intel certigas realtempan artikan nivelkontrolon. Normigitaj interfacoj ebligas al ni liberiĝi de malaltnivela pelildisvolviĝo kaj pli fokusiĝi sur altnivela algoritma novigado."
Industriaj Komprenoj
1. Integra dezajno fariĝas tendenco:la "cerbo"kaj "cerebelo" bezonas profunde kunlabori, kaj aparta arkitekturo fariĝis efikecproplempunkto.
2. Normigado kreas valoron:Normigado de aparataraj interfacoj kaj softvara peranto povas signife redukti la kompleksecon de integriĝo.
3. Nova modelo de ekologia kunlaboro:Provizantoj devus transformiĝi en "solvajn partnerojn" kaj profunde partopreni en frua klienta disvolviĝo.
05
Kernaj avantaĝoj de la APQ-Solvo
Teknika Avantaĝo
- Fuzia arkitekturo: AGX Orin+Intelcerbo kaj cerebeloatingi unuigitan decidiĝon kaj kontrolon pri aparataro, evitante proplempunktojn en la datenbuso.
- Elasta Ekspansio: Subtenas malsamajn konfiguraciojn de 12 artikoj ĝis 32 artikoj, kaj la cerebela rendimento povas esti ĝisdatigita al I7 13700H.
- Malferma ekosistemo: plene kongrua kun ĉefaj evoluigaj medioj kiel ROS 2, MATLAB/Simulink, ktp.
Servaj Avantaĝoj
- Plencikla kunuleco: provizante komunajn evoluigajn servojn de solvodezajno ĝis subteno por amasproduktado.
- Sperto-interŝanĝo: Surbaze de la sukcesa disvolva sperto de pli ol 50 robotaj klientoj, ni helpas ilin rapide progresi.
- Rapida respondo: 7 × 24-hora fora diagnozo + 48-hora surloka subteno por certigi la glatan efektivigon de la projekto.

En la hodiaŭa akceliĝanta industriigo de robotiko, evoluiga efikeco fariĝis la ŝlosilo al konkurenco. Per la kunlabora arkitekturo de "cerbo kaj cerebelo"kaj profundaj servoj, APQ ne nur helpas klientojn atingi 40%-an redukton en disvolvaj cikloj, sed ankaŭ konfirmas la gravan valoron de integra dezajno en kompleksaj robotsistemoj. Ni antaŭĝojas kunlabori kun pli da partneroj por komune antaŭenigi la alvenon de la epoko de enkorpigita inteligenteco."
Se vi interesiĝas pri nia kompanio kaj produktoj, bonvolu kontakti nian transmaran reprezentanton, Robin.
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
Afiŝtempo: Jan-09-2026