![[Valdkonnajuhtum] Kahejalgse humanoidroboti arendustsükkel lüheneb 40%! Kuidas juhtivad integraatorid saavutavad APQ „suuraju ja väikeaju“ lahendusega kiireid läbimurdeid](/style/global/img/img_45.jpg)
Oktoobrist 2025 kuni jaanuarini 2026 tegi juhtiv kodumaine humanoidrobotite integraator tihedat koostööd APQ-ga. AGX Orin + Inteli "aju ja väikeaju" koostööarhitektuuril põhineva uue põlvkonna kahejalgse humanoidroboti prototüübi väljatöötamise ja silumise viisid nad lõpule.vaid neli kuud, mis vähendab üldist arendustsüklit 40% võrreldes traditsiooniliste meetoditega.
01
Kliendi taust ja peamised väljakutsed
Kliendiprofiil
Juhtiv kodumaine ettevõte kahejalgsete humanoidrobotite uurimisel ja integreerimisel, keskendudes tipptasemel biooniliste robotite valdkonnale, mille tooted hõlmavad mitmeid stsenaariume, nagu teadusuuringud ja haridus, erioperatsioonid ja äriteenused.
Südamiku valupunkt
- Pikk arendustsükkel:Traditsioonilistes lahendustes pakuvad mooduleid nagu liikumise juhtimine, keskkonna tajumine ja otsuste planeerimine erinevad tarnijad ning integratsiooni veaotsing võtab aega kuni 8–12 kuud.
- Süsteemi koostöö raskused:Kahejalgsed robotid vajavad millisekundilise taseme koostöö saavutamiseks suuraju (otsustamist) ja väikeaju (kontrolli) ning traditsioonilisel eraldusarhitektuuril on keeruline toetada tõhusat interaktsiooni reaalajas tasakaalu ja multimodaalse teadlikkuse vahel.
- Algoritmi migratsiooni kõrge hind:Algoritmide migreerimine ja optimeerimine simulatsioonist reaalsesse masinasse nõuab sageli korduvat kohandamist erinevate riistvaraliidestega, mis aeglustab üldist edusammu.
02
APQ lahendus
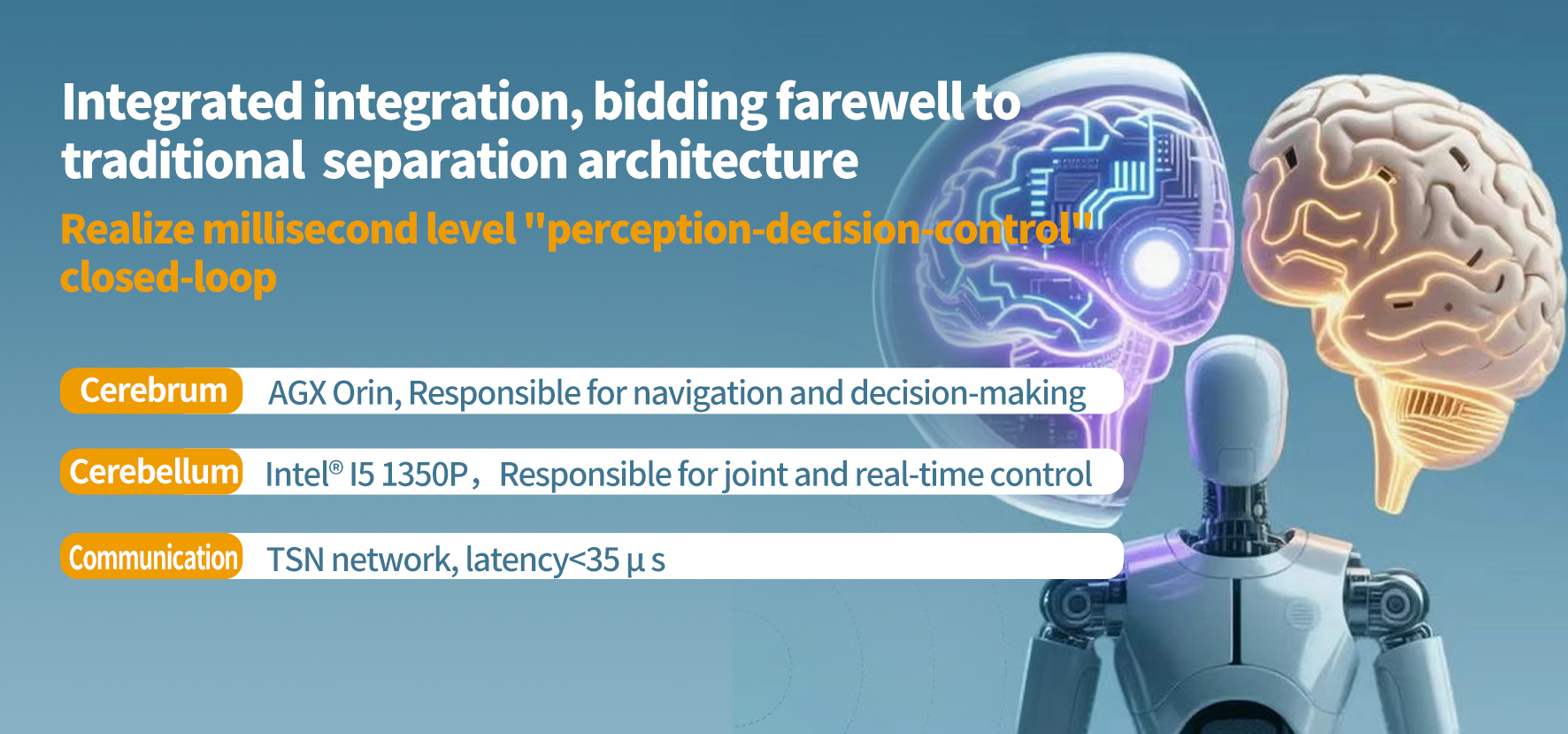
AGX Orin+Intelsuuraju ja väikeaju"Koostööarhitektuur"
1. Skeemi kavandamise etapp (oktoober 2025)
Nõuete joondamine:
Vaadata ühiselt läbi 13 põhinõuet, sh reaalajas kõnni juhtimise sagedus ≥ 1 kHz, mitme anduriga sünkroniseerimise täpsus ≤ 40 μs, ROS 2 ja kohandatud vahetarkvara kaherežiimilise töö tugi jne.
Skeemi kohandamine:
- Peamine juhtimiskiht kasutab AGX Orin+Inteli protsessoritsuuraju ja väikeajutermotuumasünteesi kontroller, mis integreerib x86 suure jõudlusega otsustusüksuse ja reaalajas juhtimisüksuse, saavutades "taju-otsuse-kontrolli" integreerimise.
- Kasutage täitmiskihis ühise kaasprotsessorina Intel I5 1350P, mis vastutab servo juhtimise ja 28 liigendi lokaalse adaptiivse reguleerimise eest.
- Side põhineb gigabitise TSN-il (ajatundlikul võrgul), mis tagab, et AGX Orini ja x86 väikeaju vaheline latentsusaeg on alla 35 μs.
2. Kiire kasutuselevõtu etapp (november–detsember 2025)
- Riistvara iseühendamine ja kasutamine:Standardsed elektrilised liidesed kohanduvad otse klientide olemasolevate servoajamite ja anduritega, vähendades kaabli kohandamise aega.
- Kasutusvalmis tarkvara kohe karbist võttes:Eelinstallitud Ubuntu 22.04 ja ROS 2 süsteemid, sisseehitatud kahejalgse roboti põhifunktsioonide pakett, kliendid saavad põhilise liikumise konfigureerimise lõpule viia 3 päeva jooksul.
- Tõhus koostööl põhinev silumine:APQ pakub kaheliinilist tuge (kohapealne+kaugjuhtimine), et kiiresti lahendada probleeme, näiteks andurite kalibreerimist, vähendades oluliselt kohapealse veaotsingu aega.
03
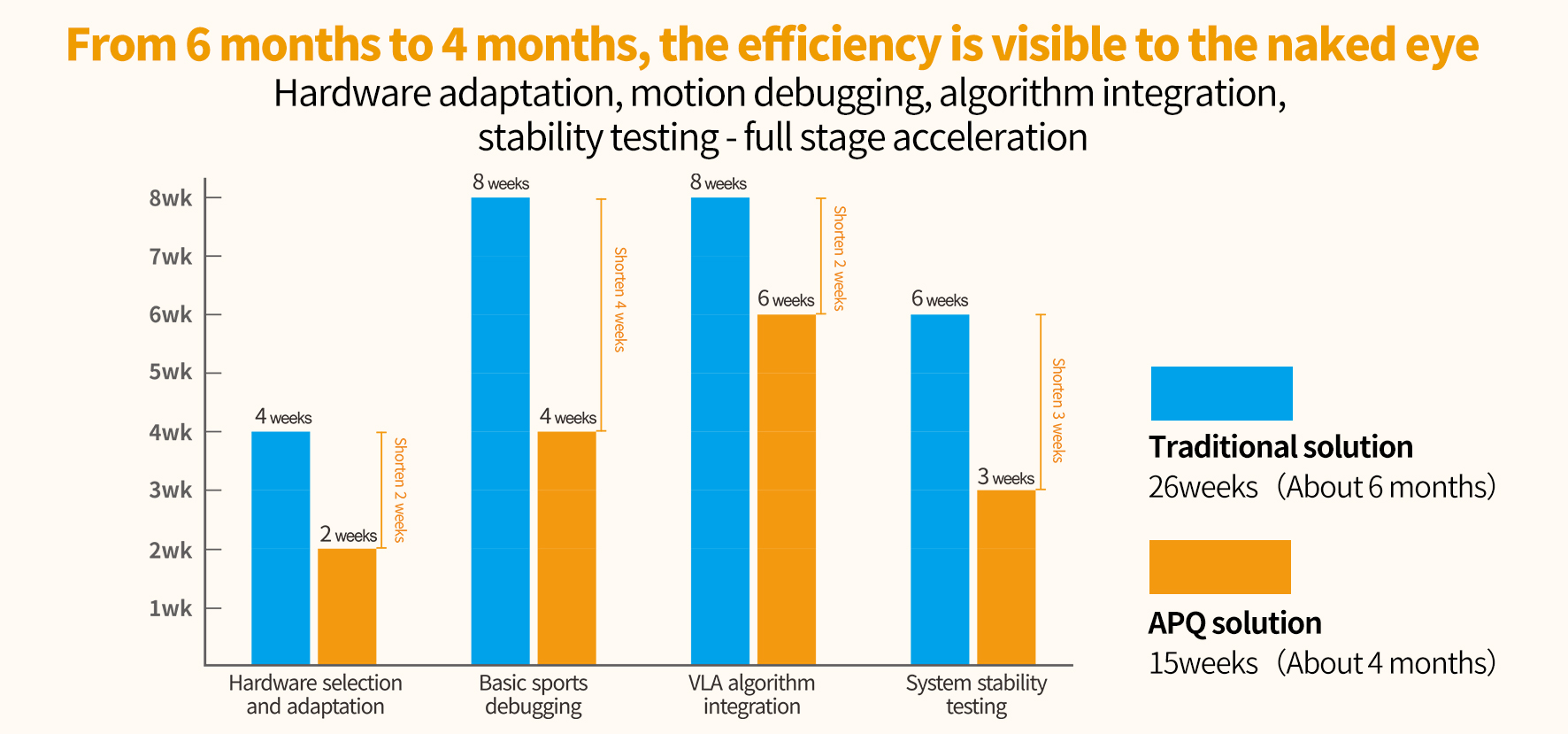
Peamine saavutus: Arendustsükkel lühenes 40% võrra
Arengu ajajoonte võrdlus
Märkimisväärne jõudluse paranemine
- Reaalajas kontroll:Kõnnikontrolli tsüklit on suurendatud 5 ms-lt 1 ms-le ja dünaamilise tasakaalu reageerimiskiirust on suurendatud 80%.
- Arenduse efektiivsus:Algoritmi iteratsiooni kiirust on parandatud ja kliendid saavad uue kõnnaku simulatsiooni ja reaalse masina verifitseerimise lõpule viia 7 päeva jooksul (tavapäraselt võtab see aega 20 päeva).
- Süsteemi stabiilsus:Pidev 72-tunnine koormustest ilma riketeta, MTBF (keskmine riketevaheline aeg) tõusis 1000 tunnini.
04
Klientide tagasiside ja valdkonnaülevaated
Kliendi tehnilise direktori hindamine
APQ-dsuuraju ja väikeaju„Arhitektuur lahendab robotite arendamise valupunktid tõeliselt. AGX Orin võimaldab meil kiiresti käivitada keerulisi navigatsioonialgoritme, samas kui Inteli väikeaju tagab reaalajas liigesetaseme juhtimise. Standardiseeritud liidesed võimaldavad meil loobuda madala taseme draiverite arendamisest ja keskenduda rohkem kõrgema taseme algoritmide innovatsioonile.“
Valdkonna ülevaated
1. Integreeritud disain on muutumas trendiks:see "suuraju„ja“ väikeaju peavad tegema tihedat koostööd ning eraldi arhitektuurist on saanud efektiivsuse kitsaskoht.
2. Standardimine loob väärtust:Riistvaraliideste ja tarkvara vahevara standardiseerimine võib integreerimise keerukust oluliselt vähendada.
3. Uus ökoloogilise koostöö mudel:Tarnijad peaksid muutuma "lahenduspartneriteks" ja osalema sügavalt klientide arendamises juba varases etapis.
05
APQ lahenduse peamised eelised
Tehniline eelis
- Fusion-arhitektuur: AGX Orin+Intelsuuraju ja väikeajusaavutada ühtne riistvaraline otsustusprotsess ja juhtimine, vältides andmesiini kitsaskohti.
- Elastne paisumine: Toetab erinevaid konfiguratsioone 12 liigesest kuni 32 liigeseni ja väikeaju jõudlust saab suurendada kuni I7 13700H-ni.
- Avatud ökosüsteem: täielikult ühildub tavapäraste arenduskeskkondadega nagu ROS 2, MATLAB/Simulink jne.
Teenuse eelised
- Täistsükli partnerlus: ühiste arendusteenuste pakkumine lahenduste kavandamisest kuni masstootmise toetamiseni.
- Kogemuste jagamine: Tuginedes enam kui 50 robotikliendi edukale arenduskogemusele, aitame neil kiiresti edasi liikuda.
- Kiire reageerimine: 7 × 24-tunnine kaugdiagnostika + 48-tunnine kohapealne tugi projekti sujuva elluviimise tagamiseks.

Tänapäeva kiirenevas robootika industrialiseerimises on arendustõhususest saanud konkurentsi võti. Tänu koostööl põhinevale arhitektuurile "suuraju ja väikeaju„Ja süvateenuste abil aitab APQ klientidel mitte ainult 40% võrra lühendada arendustsüklit, vaid kinnitab ka integreeritud disaini olulist väärtust keerukates robotisüsteemides. Ootame koostööd rohkemate partneritega, et ühiselt edendada kehastunud intelligentsuse ajastu saabumist.“
Kui olete meie ettevõttest ja toodetest huvitatud, võtke julgelt ühendust meie välismaise esindaja Robiniga.
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
Postituse aeg: 09.01.2026