![[Industria Kasua] Robot humanoide bipedalaren garapen zikloa % 40 laburtu da! Nola lortzen dituzten integratzaile nagusiek aurrerapen azkarrak APQ-ren](/style/global/img/img_45.jpg)
2025eko urritik 2026ko urtarrilera, tokiko humanoide robot integratzaile nagusi batek APQrekin estuki lan egin zuen. AGX Orin + Intel "garuna eta zerebeloa" arkitektura kolaboratiboan oinarrituta, belaunaldi berriko robot humanoide bipedo baten prototipoaren garapena eta arazketa burutu zuten.lau hilabete besterik ez, garapen-ziklo orokorra % 40 murriztuz metodo tradizionalen aldean.
01
Bezeroen aurrekariak eta erronka nagusiak
Bezeroaren profila
Giza robot bipedalen ikerketan eta integrazioan liderra den enpresa nazionala, goi-mailako robot bionikoen arloan espezializatua, hainbat eszenatoki hartzen dituena, hala nola ikerketa zientifikoa eta hezkuntza, eragiketa bereziak eta zerbitzu komertzialak.
Minaren muina
- Garapen-ziklo luzea:Ohiko irtenbideetan, mugimenduaren kontrola, ingurumenaren pertzepzioa eta erabakien plangintza bezalako moduluak hornitzaile ezberdinek eskaintzen dituzte, eta integrazioaren arazketa 8-12 hilabete arte irauten du.
- Sistemaren lankidetzan zailtasunak:Robot bipikoek "garuna" (erabakiak hartzea) eta "zerebeloa" (kontrola) behar dituzte milisegundoko mailako lankidetza lortzeko, eta bereizketa-arkitektura tradizionala zaila da denbora errealeko orekaren eta kontzientzia multimodalaren arteko elkarrekintza eraginkorra sustatzeko.
- Algoritmoen migrazioaren kostu handia:Algoritmoen migrazioak eta optimizazioak simulaziotik makina errealera egiteak askotan hardware interfaze desberdinetara behin eta berriz egokitzea eskatzen du, eta horrek aurrerapen orokorra moteltzen du.
02
APQ irtenbidea
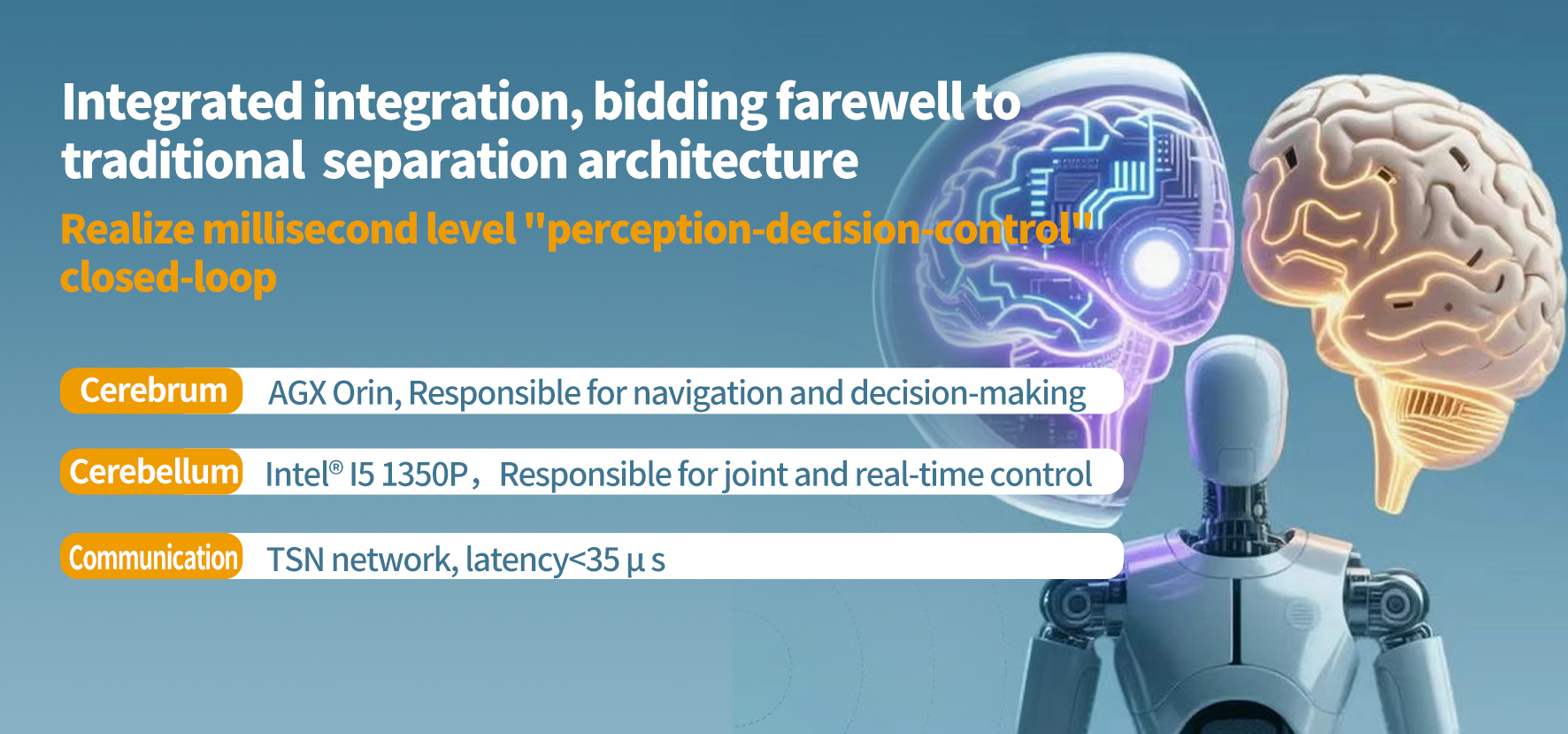
AGX Orin+Intelgaruna eta zerebeloaArkitektura kolaboratiboa
1. Eskemaren diseinu fasea (2025eko urria)
Eskakizunen lerrokatzea:
13 oinarrizko eskakizun batera berrikusi, besteak beste, denbora errealeko ibiltzeko kontrol maiztasuna ≥ 1kHz, sentsore anitzeko sinkronizazio zehaztasuna ≤ 40 μs, ROS 2rako eta middleware pertsonalizatuko modu bikoitzeko euskarria, etab.
Eskemaren pertsonalizazioa:
- Kontrol geruza nagusiak AGX Orin+Intel hartzen dugaruna eta zerebeloafusio-kontrolatzailea, x86 errendimendu handiko erabaki-unitatea eta denbora errealeko kontrol-unitatea integratuz, "pertzepzio-erabaki-kontrola" integrazioa lortuz.
- Ezarri Intel I5 1350P exekuzio geruzan juntura-koprozesadore gisa, 28 juntura servo-kontrola eta tokiko doikuntza egokitzaileaz arduratuz.
- Komunikazioa Gigabit TSN (Denboraarekiko Sentikorra den Sarea) oinarritzen da, AGX Orin eta x86 zerebeloaren arteko latentzia 35 μs baino txikiagoa izan dadin bermatuz.
2. Hedapen azkarreko fasea (2025eko azaroa-abendua)
- Hardwarea konektatu eta erabili:Interfaze elektriko estandarrak zuzenean egokitzen dira bezeroen servo unitate eta sentsoreetara, kableen pertsonalizazio denbora murriztuz.
- Kutxatik aterata erabiltzeko prest dagoen softwarea:Ubuntu 22.04 eta ROS 2 sistemak aurrez instalatuta, robot bipedalaren oinarrizko funtzio paketea barneratuta, bezeroek 3 eguneko epean oinarrizko mugimendu konfigurazioa osatu dezakete.
- Lankidetzazko arazketa eraginkorra:APQ-k "tokian bertan + urruneko" laguntza bikoitza eskaintzen du sentsoreen kalibrazioa bezalako arazoak azkar konpontzeko, tokiko arazketa-denbora asko murriztuz.
03
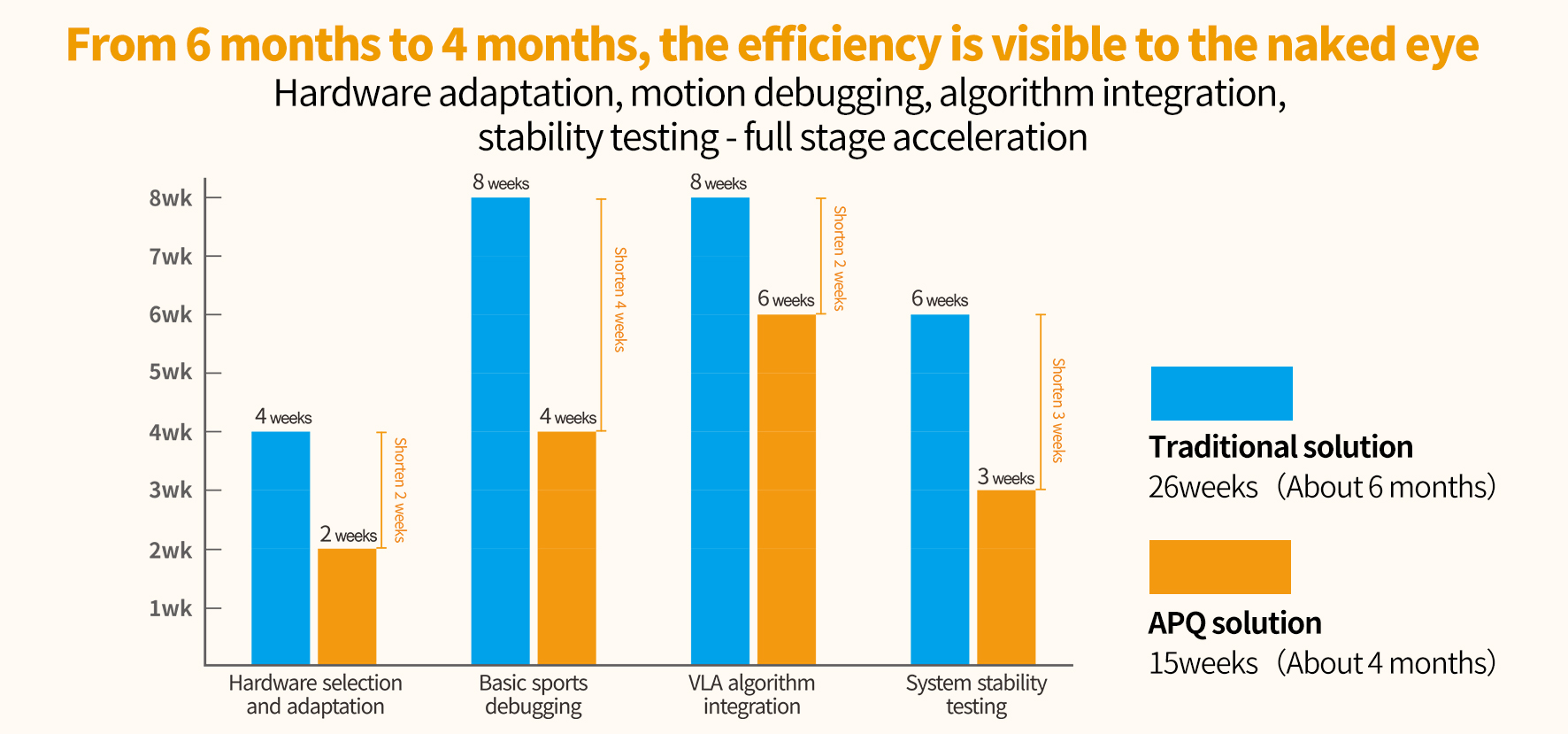
Lorpen nagusia: Garapen-zikloa % 40 laburtu da
Garapen-denbora-lerroen konparaketa
Errendimenduaren hobekuntza nabarmena
- Denbora errealeko kontrola:Ibiltzeko kontrol zikloa 5 ms-tik 1 ms-ra handitu da, eta oreka dinamikoaren erantzun abiadura % 80 handitu da.
- Garapen-eraginkortasuna:Algoritmoaren iterazio-abiadura hobetu da, eta bezeroek ibilera berriaren simulazio-makina errealeko egiaztapena 7 eguneko epean burutu dezakete (tradizionalki 20 egun behar izaten dira).
- Sistemaren egonkortasuna:72 orduko karga-proba jarraitua akatsik gabe, MTBF (Akatsen arteko Batez Besteko Denbora) 1000 ordura igo zen.
04
Bezeroen iritziak eta industriaren ikuspegiak
Bezeroen Zuzendari Teknikoaren Ebaluazioa
APQakgaruna eta zerebeloaArkitekturak roboten garapenaren arazo-puntuak konpontzen ditu benetan. AGX Orin-ek nabigazio-algoritmo konplexuak azkar exekutatzeko aukera ematen digu, eta Intel-en zerebeloak artikulazio-mailaren kontrola denbora errealean bermatzen du. Interfaze estandarizatuek behe-mailako gidarien garapenetik aldentzeko eta goi-mailako algoritmoen berrikuntzan gehiago zentratzeko aukera ematen digute.
Industriaren ikuspegiak
1. Diseinu integratua joera bihurtzen ari da:"garuna"eta "zerebeloak" sakonki elkarlanean aritu behar dute, eta arkitektura bereizi bat eraginkortasun-oztopo bihurtu da.
2. Estandarizazioak balioa sortzen du:Hardware interfazeen eta software middlewarearen estandarizazioak integrazioaren konplexutasuna nabarmen murriztu dezake.
3. Lankidetza ekologikoaren eredu berria:Hornitzaileek "irtenbide-bazkide" bihurtu eta bezeroen garapen goiztiarrean sakonki parte hartu beharko lukete.
05
APQ irtenbidearen abantaila nagusiak
Abantaila teknikoa
- Fusio arkitektura: AGX Orin+Intelgaruna eta zerebeloahardwarearen erabakiak hartzeko eta kontrolatzeko prozesu bateratua lortzea, datu-busaren oztopoak saihestuz.
- Hedapen elastikoa: 12 artikulaziotik 32 artikulaziora bitarteko konfigurazio desberdinak onartzen ditu, eta zerebeloko errendimendua I7 13700H-ra igo daiteke.
- Ekosistema irekia: guztiz bateragarria garapen-ingurune nagusiekin, hala nola ROS 2, MATLAB/Simulink, etab.
Zerbitzuaren abantailak
- Ziklo osoko laguntza: garapen zerbitzu bateratuak eskaintzea, irtenbideen diseinutik hasi eta ekoizpen masiboaren laguntzaraino.
- Esperientziak partekatzea: 50 robot bezero baino gehiagoren garapen esperientzia arrakastatsuan oinarrituta, azkar aurrera egiten laguntzen diegu.
- Erantzun azkarra: 7 × 24 orduko urruneko diagnostikoa + 48 orduko laguntza bertan, proiektuaren ezarpen egokia bermatzeko.

Gaur egungo robotikaren industrializazio bizkortuan, garapen-eraginkortasuna lehiaren gakoa bihurtu da. ""-ren arkitektura kolaboratiboaren bidezgaruna eta zerebeloa"eta zerbitzu sakonei esker, APQ-k ez die bezeroei garapen-zikloetan % 40ko murrizketa lortzen laguntzen bakarrik, baita diseinu integratuaren balio garrantzitsua egiaztatzen ere robot-sistema konplexuetan. Adimen gorpuztuaren aroaren etorrera elkarrekin sustatzeko bazkide gehiagorekin lan egitea espero dugu."
Gure enpresan eta produktuetan interesa baduzu, jar zaitez harremanetan gure atzerriko ordezkariarekin, Robinekin.
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
Argitaratze data: 2026ko urtarrilaren 9a