![[Étude de cas] Cycle de développement d'un robot humanoïde bipède raccourci de 40 % ! Comment les principaux intégrateurs réalisent des avancées rapides grâce à la solution « cerveau et cervelet » d'APQ](/style/global/img/img_45.jpg)
D'octobre 2025 à janvier 2026, un intégrateur chinois de premier plan spécialisé dans les robots humanoïdes a collaboré étroitement avec APQ. S'appuyant sur l'architecture collaborative « cerveau et cervelet » AGX Orin + Intel, ils ont finalisé le développement et la mise au point d'un prototype de robot humanoïde bipède de nouvelle génération.En seulement quatre mois, le cycle de développement global est réduit de 40 % par rapport aux méthodes traditionnelles..
01
Profil du client et principaux défis
Profil client
Une entreprise nationale de premier plan dans la recherche et l'intégration de robots humanoïdes bipèdes, spécialisée dans le domaine des robots bioniques haut de gamme, avec des produits couvrant de multiples scénarios tels que la recherche scientifique et l'éducation, les opérations spéciales et les services commerciaux.
Point sensible principal
- Cycle de développement long :Dans les solutions traditionnelles, les modules tels que le contrôle de mouvement, la perception de l'environnement et la planification des décisions sont fournis par différents fournisseurs, et le débogage de l'intégration peut prendre jusqu'à 8 à 12 mois.
- Difficultés de collaboration au sein du système :Les robots bipèdes ont besoin d'un « cerveau » (prise de décision) et d'un « cervelet » (contrôle) pour parvenir à une collaboration au niveau de la milliseconde, et l'architecture de séparation traditionnelle peine à prendre en charge une interaction efficace entre l'équilibre en temps réel et la conscience multimodale.
- Coût élevé de la migration des algorithmes :La migration et l'optimisation des algorithmes de la simulation vers la machine réelle nécessitent souvent une adaptation répétée à différentes interfaces matérielles, ce qui ralentit la progression globale.
02
Solution APQ
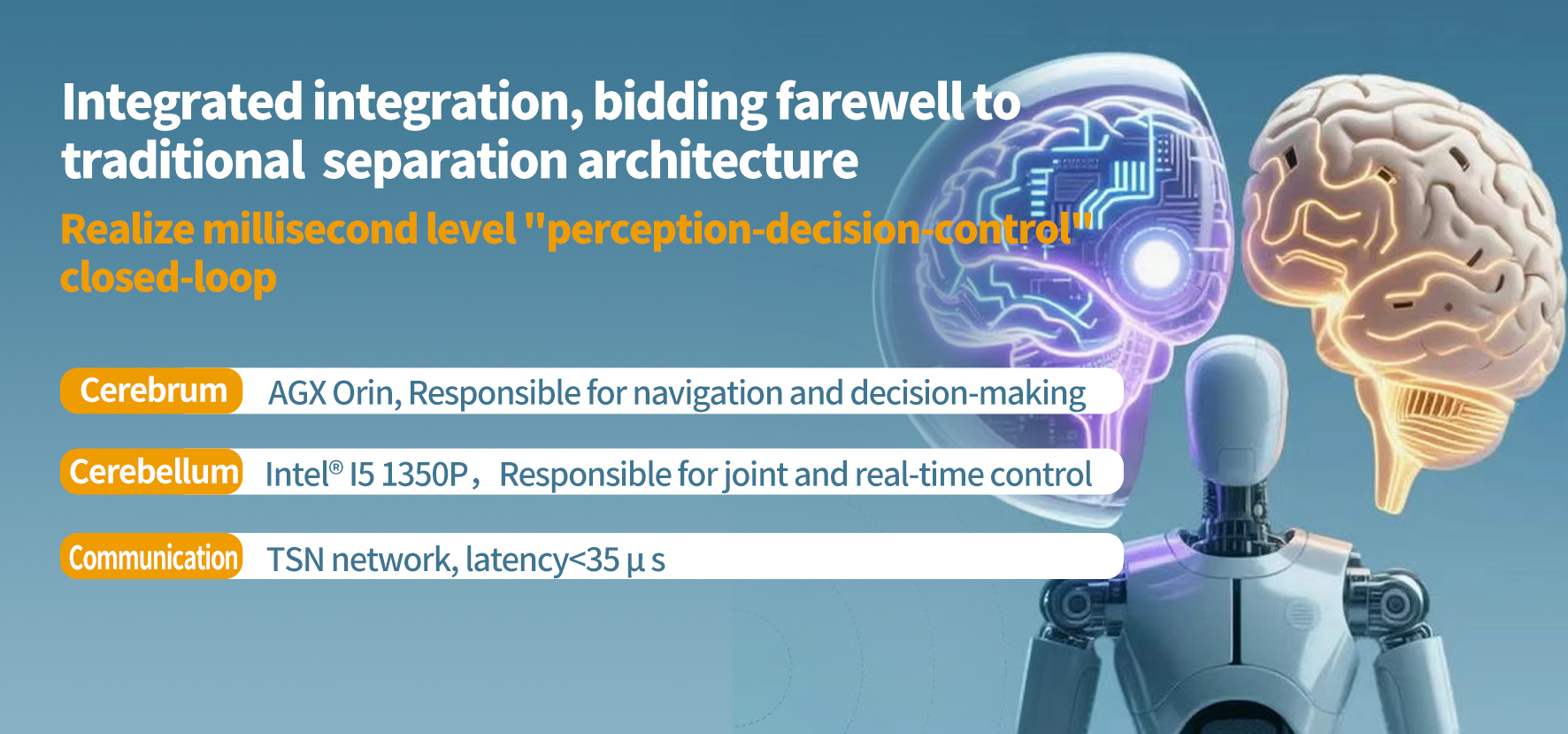
AGX Orin+Intel "cerveau et cervelet« Architecture collaborative »
1. Phase de conception du projet (octobre 2025)
Alignement des exigences :
Examiner conjointement 13 exigences fondamentales, notamment une fréquence de contrôle de la démarche en temps réel ≥ 1 kHz, une précision de synchronisation multi-capteurs ≤ 40 μs, la prise en charge de ROS 2 et d'un middleware double mode personnalisé, etc.
Personnalisation du schéma :
- La couche de contrôle principale utilise AGX Orin+Intelcerveau et cerveletContrôleur de fusion, intégrant une unité de décision haute performance x86 et une unité de contrôle en temps réel, réalisant l'intégration de la « perception-décision-contrôle ».
- Déployer un Intel I5 1350P comme coprocesseur conjoint dans la couche d'exécution, responsable du contrôle servo et du réglage adaptatif local de 28 articulations.
- La communication est basée sur le réseau Gigabit TSN (Time Sensitive Network), garantissant que la latence entre AGX Orin et le cervelet x86 est inférieure à 35 μs.
2. Phase de déploiement rapide (novembre-décembre 2025)
- Matériel prêt à l'emploi :Les interfaces électriques standard s'adaptent directement aux servomoteurs et capteurs existants des clients, réduisant ainsi le temps de personnalisation des câbles.
- Logiciel prêt à l'emploi dès sa sortie de l'emballage :Systèmes Ubuntu 22.04 et ROS 2 préinstallés, package de fonctions de base pour robot bipède intégré, les clients peuvent effectuer la configuration de mouvement de base en 3 jours.
- Débogage collaboratif efficace :APQ propose une assistance à double niveau « sur site et à distance » pour résoudre rapidement les problèmes tels que l'étalonnage des capteurs, réduisant considérablement le temps de débogage sur site.
03
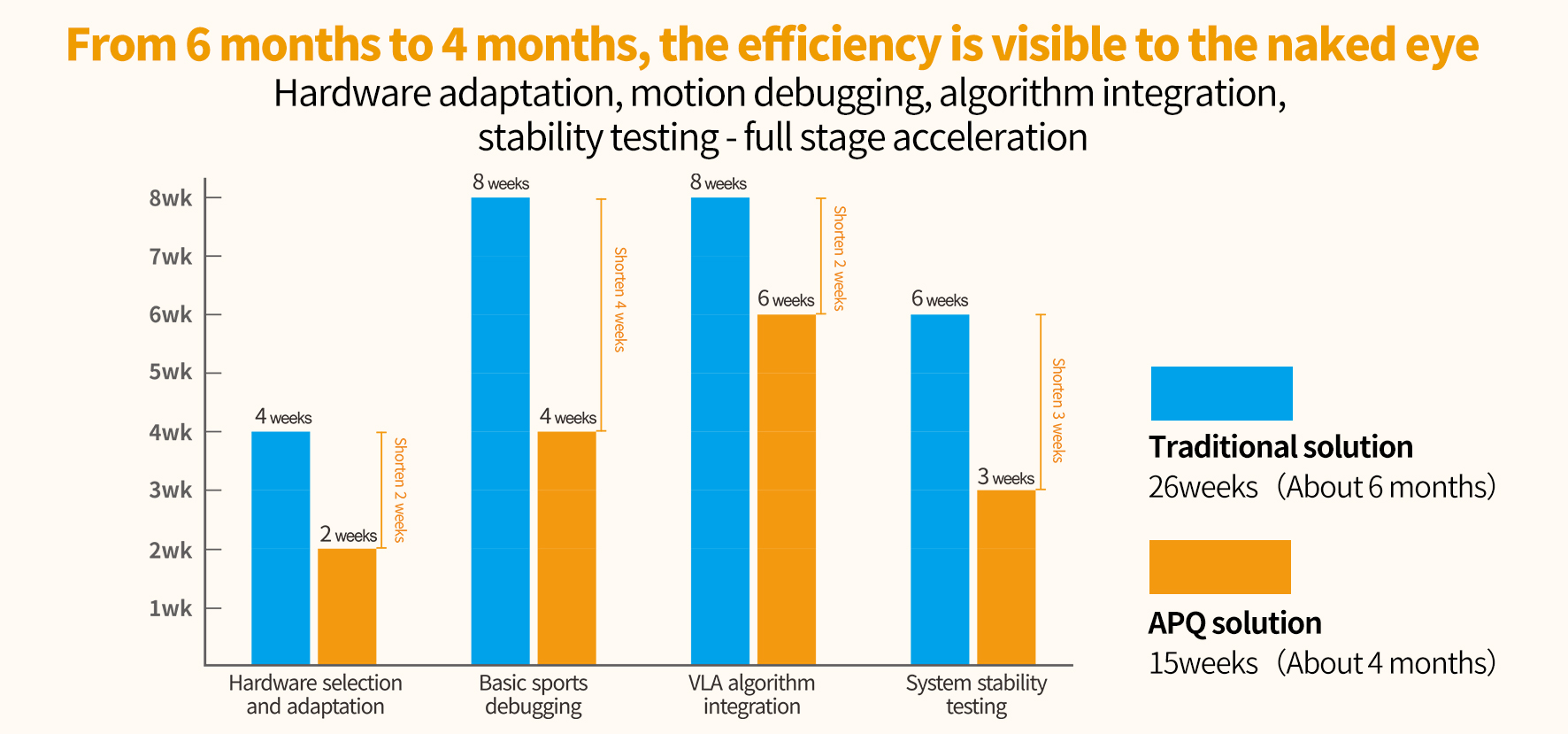
Réalisation clé : Cycle de développement raccourci de 40 %
Comparaison des calendriers de développement
Amélioration significative des performances
- Contrôle en temps réel :Le cycle de contrôle de la marche a été augmenté de 5 ms à 1 ms, et la vitesse de réponse de l'équilibre dynamique a été augmentée de 80 %.
- Efficacité du développement :La vitesse d'itération de l'algorithme a été améliorée et les clients peuvent désormais effectuer la vérification de la nouvelle démarche sur une machine réelle en 7 jours (contre 20 jours auparavant).
- Stabilité du système :Test de charge continu de 72 heures sans défaut, MTBF (temps moyen entre les pannes) augmenté à 1000 heures.
04
Commentaires des clients et perspectives du secteur
Évaluation du directeur technique client
APQs'cerveau et cervelet« L'architecture résout véritablement les problèmes liés au développement robotique. AGX Orin nous permet d'exécuter rapidement des algorithmes de navigation complexes, tandis que le processeur Intel Cerebellum assure un contrôle articulaire en temps réel. Les interfaces standardisées nous permettent de nous affranchir du développement de pilotes de bas niveau et de nous concentrer davantage sur l'innovation algorithmique de haut niveau. »
Perspectives du secteur
1. La conception intégrée devient une tendance :le "cerveau« et le cervelet doivent collaborer étroitement, et une architecture séparée est devenue un goulot d’étranglement en termes d’efficacité. »
2. La standardisation crée de la valeur :La standardisation des interfaces matérielles et des intergiciels peut réduire considérablement la complexité de l'intégration.
3. Nouveau modèle de collaboration écologique :Les fournisseurs devraient se transformer en « partenaires de solutions » et participer activement au développement précoce des clients.
05
Principaux avantages de la solution APQ
Avantage technique
- Architecture Fusion : AGX Orin+Intelcerveau et cerveletparvenir à une prise de décision et à un contrôle unifiés du matériel, en évitant les goulots d'étranglement du bus de données.
- Extension élastique : Prend en charge différentes configurations de 12 à 32 articulations, et les performances cérébelleuses peuvent être mises à niveau jusqu'à l'I7 13700H.
- Écosystème ouvert : entièrement compatible avec les environnements de développement courants tels que ROS 2, MATLAB/Simulink, etc.
Avantages du service
- Accompagnement complet : fourniture de services de développement conjoints, de la conception de la solution au support de la production en série.
- Partage d'expérience : Forts de notre expérience réussie en matière de développement de robots pour plus de 50 clients, nous les aidons à progresser rapidement.
- Réponse rapide : diagnostic à distance 24h/24 et 7j/7 + assistance sur site 48h/24 pour garantir le bon déroulement du projet.

Dans le contexte actuel d'industrialisation accélérée de la robotique, l'efficacité du développement est devenue la clé de la compétitivité. Grâce à l'architecture collaborative de «cerveau et cerveletGrâce à ses services approfondis, APQ aide ses clients à réduire leurs cycles de développement de 40 % et confirme l'importance de la conception intégrée dans les systèmes robotiques complexes. Nous sommes impatients de collaborer avec davantage de partenaires afin de promouvoir ensemble l'avènement de l'ère de l'intelligence embarquée.
Si vous êtes intéressé par notre entreprise et nos produits, n'hésitez pas à contacter notre représentant à l'étranger, Robin.
Email: yang.chen@apuqi.com
WhatsApp : +86 18351628738
Date de publication : 9 janvier 2026