
2025年10月から2026年1月にかけて、国内有数のヒューマノイドロボットインテグレーターがAPQと緊密に協力し、AGX Orin + Intelの「大脳と小脳」協調アーキテクチャに基づいて、新世代の二足歩行ヒューマノイドロボットのプロトタイプの開発とデバッグを2025年10月から2026年1月にかけて完了しました。わずか4か月で、従来の方法に比べて開発サイクル全体を40%短縮.
01
顧客の背景と主な課題
顧客プロフィール
二足歩行ヒューマノイドロボットの研究と統合における国内有数の企業であり、ハイエンドバイオニックロボットの分野に注力し、製品は科学研究と教育、特殊作戦、商業サービスなど、複数のシナリオをカバーしています。
コアペインポイント
- 長い開発サイクル:従来のソリューションでは、モーション制御、環境認識、意思決定計画などのモジュールは異なるサプライヤーによって提供され、統合デバッグには最大 8 ~ 12 か月かかります。
- システム連携の難しさ:二足歩行ロボットは、ミリ秒レベルのコラボレーションを実現するために「大脳」(意思決定)と「小脳」(制御)を必要としますが、従来の分離アーキテクチャでは、リアルタイムのバランスとマルチモーダル認識の間の効率的な相互作用をサポートすることが困難です。
- アルゴリズム移行のコストが高い:シミュレーションから実際のマシンへのアルゴリズムの移行と最適化では、さまざまなハードウェア インターフェイスへの繰り返しの適応が必要になることが多く、全体的な進捗が遅くなります。
02
APQソリューション
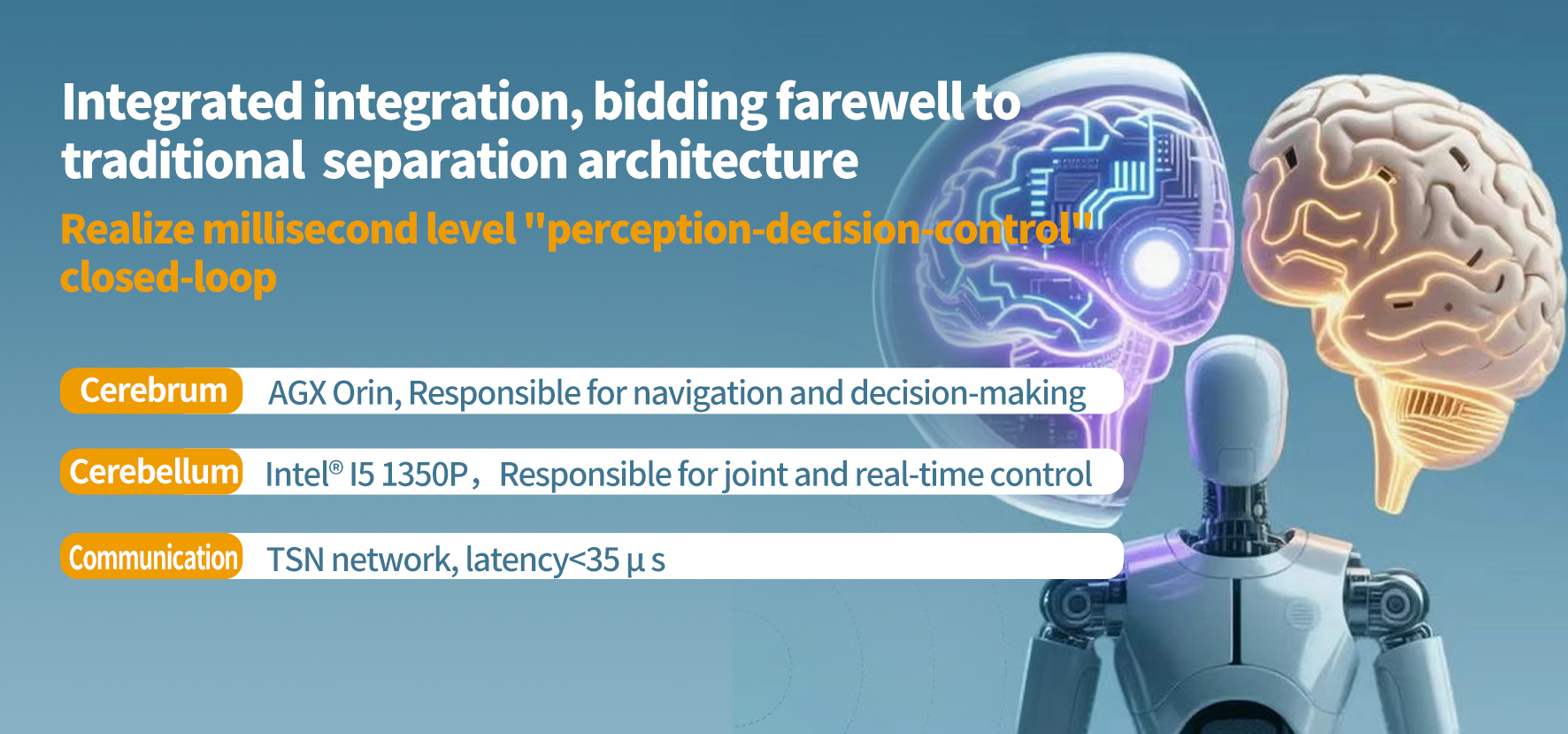
AGX Orin+Intel "大脳と小脳「コラボレーションアーキテクチャ
1. 計画設計段階(2025年10月)
要件の調整:
リアルタイム歩行制御周波数≥1kHz、マルチセンサー同期精度≤40μs、ROS 2およびカスタムミドルウェアデュアルモードのサポートなど、13のコア要件を共同でレビューします。
スキームのカスタマイズ:
- メイン制御層はAGX Orin+Intelを採用大脳と小脳フュージョンコントローラは、x86高性能決定ユニットとリアルタイム制御ユニットを統合し、「知覚-決定-制御」の統合を実現します。
- 実行層のジョイント コプロセッサとして Intel I5 1350P を展開し、サーボ制御と 28 個のジョイントのローカル適応調整を担当します。
- 通信はギガビット TSN (Time Sensitive Network) に基づいており、AGX Orin と x86 小脳間の遅延が 35 μ s 未満であることを保証します。
2. 迅速展開フェーズ(2025年11月~12月)
- ハードウェアのプラグアンドプレイ:標準の電気インターフェースは、顧客の既存のサーボ ドライブとセンサーに直接適合し、ケーブルのカスタマイズ時間を短縮します。
- すぐに使えるソフトウェア:Ubuntu 22.04とROS 2システムがプリインストールされ、二足歩行ロボットの基本機能パッケージが組み込まれているため、お客様は3日以内に基本的な動作構成を完了できます。
- 効率的な共同デバッグ:APQ は「オンサイト + リモート」のデュアルライン サポートを提供し、センサーのキャリブレーションなどの問題を迅速に解決し、オンサイトでのデバッグ時間を大幅に短縮します。
03
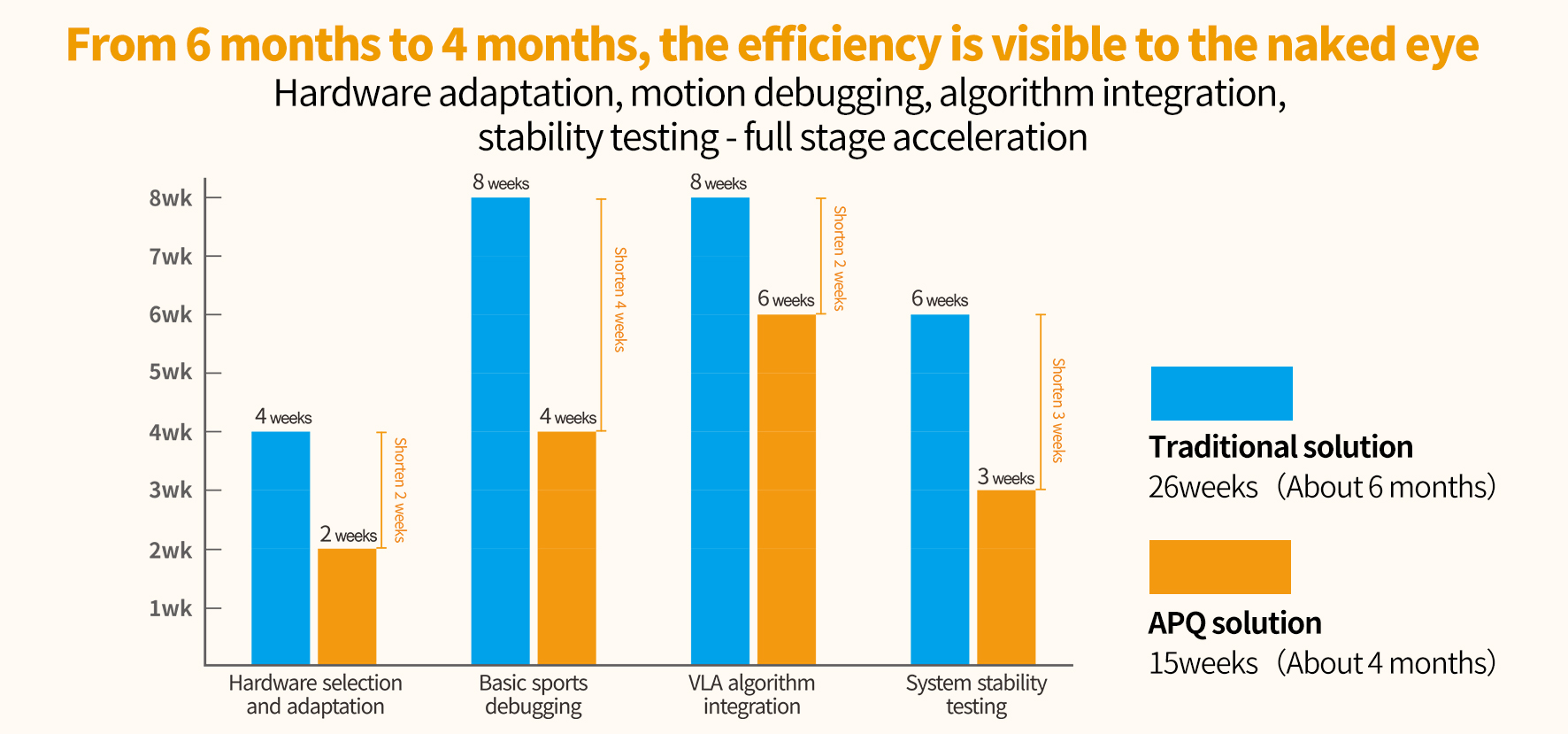
主な成果: 開発サイクルが40%短縮
開発タイムラインの比較
パフォーマンスの大幅な向上
- リアルタイム制御:歩行制御周期は5msから1msに増加し、動的バランス応答速度は80%向上しました。
- 開発効率:アルゴリズムの反復速度が向上し、お客様は新しい歩行のシミュレーション実機検証を 7 日以内に完了できます (従来は 20 日かかります)。
- システムの安定性:72 時間の連続負荷テストでも障害は発生せず、MTBF (平均故障間隔) は 1000 時間に増加しました。
04
顧客からのフィードバックと業界の洞察
顧客テクニカルディレクターの評価
APQの大脳と小脳「このアーキテクチャは、ロボット開発の課題を真に解決します。AGX Orinは複雑なナビゲーションアルゴリズムを迅速に実行することを可能にし、Intelの小脳は関節レベルのリアルタイム制御を保証します。標準化されたインターフェースにより、低レベルのドライバ開発から脱却し、高レベルのアルゴリズムの革新に集中できるようになります。」
業界の洞察
1. 統合型デザインがトレンドになりつつある「大脳「脳」と「小脳」は密接に連携する必要があり、別々のアーキテクチャが効率のボトルネックになっています。
2.標準化は価値を創造する:ハードウェア インターフェイスとソフトウェア ミドルウェアの標準化により、統合の複雑さが大幅に軽減されます。
3. 新しい生態学的協力モデル:サプライヤーは「ソリューションパートナー」へと変革し、早期の顧客開発に深く関与する必要があります。
05
APQソリューションの主な利点
技術的優位性
- 融合アーキテクチャ: AGX Orin+Intel大脳と小脳データ バスのボトルネックを回避し、統一されたハードウェアの意思決定と制御を実現します。
- 弾性拡張:12 関節から 32 関節までのさまざまな構成をサポートし、小脳のパフォーマンスを I7 13700H にアップグレードできます。
- オープンエコシステム: ROS 2、MATLAB/Simulink などの主流の開発環境と完全に互換性があります。
サービスの利点
- フルサイクルコンパニオンシップ:ソリューション設計から量産サポートまで共同開発サービスを提供します。
- 経験の共有:50 社以上のロボットクライアントの開発成功経験に基づき、クライアントの迅速な発展を支援します。
- 迅速な対応: 7 × 24 時間リモート診断 + 48 時間のオンサイト サポートにより、プロジェクトのスムーズな実施を保証します。

ロボット産業の急速な発展に伴い、開発効率が競争の鍵となっています。「大脳と小脳APQは、高度なサービスと深い知識に基づき、お客様の開発サイクルを40%短縮するだけでなく、複雑なロボットシステムにおける統合設計の重要な価値を検証します。私たちは、より多くのパートナーと協力し、具現化された知能時代の到来を共同で推進していくことを楽しみにしています。
当社および当社製品にご興味がございましたら、お気軽に海外担当者のロビンまでお問い合わせください。
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
投稿日時: 2026年1月9日