![[ກໍລະນີອຸດສາຫະກຳ] ວົງຈອນການພັດທະນາຫຸ່ນຍົນຮູບຮ່າງຄ້າຍຄືມະນຸດສອງຕີນສັ້ນລົງ 40%! ວິທີທີ່ຜູ້ປະສົມປະສານຊັ້ນນຳບັນລຸຄວາມກ້າວໜ້າຢ່າງວ່ອງໄວດ້ວຍວິທີແກ້ໄຂ “ສະໝອງ ແລະ ສະໝອງນ້ອຍ” ຂອງ APQ](/style/global/img/img_45.jpg)
ແຕ່ເດືອນຕຸລາ 2025 ຫາເດືອນມັງກອນ 2026, ຜູ້ລວມຫຸ່ນຍົນຮູບຮ່າງຄ້າຍຄືມະນຸດຊັ້ນນໍາພາຍໃນປະເທດໄດ້ຮ່ວມມືຢ່າງໃກ້ຊິດກັບ APQ. ໂດຍອີງໃສ່ສະຖາປັດຕະຍະກໍາການຮ່ວມມື "cerebrum and cerebellum" ຂອງ AGX Orin + Intel, ພວກເຂົາໄດ້ສໍາເລັດການພັດທະນາ ແລະ ແກ້ໄຂຂໍ້ຜິດພາດຂອງຕົ້ນແບບຫຸ່ນຍົນຮູບຮ່າງຄ້າຍຄືມະນຸດສອງຂາລຸ້ນໃໝ່ພາຍໃນ...ພຽງແຕ່ສີ່ເດືອນ, ຫຼຸດຜ່ອນວົງຈອນການພັດທະນາໂດຍລວມລົງ 40% ເມື່ອທຽບກັບວິທີການແບບດັ້ງເດີມ.
01
ຄວາມເປັນມາຂອງລູກຄ້າ ແລະ ສິ່ງທ້າທາຍຫຼັກ
ໂປຣໄຟລ໌ລູກຄ້າ
ວິສາຫະກິດພາຍໃນປະເທດຊັ້ນນໍາໃນການຄົ້ນຄວ້າ ແລະ ການເຊື່ອມໂຍງຫຸ່ນຍົນມະນຸດສອງຂາ, ໂດຍສຸມໃສ່ຂະແໜງຫຸ່ນຍົນໄບໂອນິກລະດັບສູງ, ດ້ວຍຜະລິດຕະພັນທີ່ກວມເອົາຫຼາຍສະຖານະການເຊັ່ນ: ການຄົ້ນຄວ້າວິທະຍາສາດ ແລະ ການສຶກສາ, ການປະຕິບັດງານພິເສດ, ແລະ ການບໍລິການທາງການຄ້າ.
ຈຸດເຈັບປວດຫຼັກ
- ວົງຈອນການພັດທະນາທີ່ຍາວນານ:ໃນວິທີແກ້ໄຂແບບດັ້ງເດີມ, ໂມດູນຕ່າງໆເຊັ່ນ: ການຄວບຄຸມການເຄື່ອນໄຫວ, ການຮັບຮູ້ສິ່ງແວດລ້ອມ, ແລະ ການວາງແຜນການຕັດສິນໃຈແມ່ນໄດ້ຮັບການສະໜອງຈາກຜູ້ສະໜອງທີ່ແຕກຕ່າງກັນ, ແລະ ການແກ້ໄຂຂໍ້ຜິດພາດໃນການເຊື່ອມໂຍງໃຊ້ເວລາເຖິງ 8-12 ເດືອນ.
- ຄວາມຫຍຸ້ງຍາກໃນການຮ່ວມມືລະບົບ:ຫຸ່ນຍົນສອງຂາຕ້ອງການ "cerebrum" (ການຕັດສິນໃຈ) ແລະ "cerebellum" (ການຄວບຄຸມ) ເພື່ອບັນລຸການຮ່ວມມືໃນລະດັບມິນລິວິນາທີ, ແລະສະຖາປັດຕະຍະກຳການແຍກແບບດັ້ງເດີມແມ່ນຍາກທີ່ຈະສະໜັບສະໜູນການພົວພັນທີ່ມີປະສິດທິພາບລະຫວ່າງຄວາມສົມດຸນໃນເວລາຈິງ ແລະ ການຮັບຮູ້ຫຼາຍຮູບແບບ.
- ຕົ້ນທຶນສູງຂອງການຍ້າຍຂໍ້ມູນອັລກໍຣິທຶມ:ການຍ້າຍ ແລະ ການເພີ່ມປະສິດທິພາບຂອງອັລກໍຣິທຶມຈາກການຈຳລອງໄປສູ່ເຄື່ອງຈັກຈິງມັກຈະຕ້ອງການການປັບຕົວຊ້ຳໆກັບອິນເຕີເຟດຮາດແວທີ່ແຕກຕ່າງກັນ, ເຊິ່ງເຮັດໃຫ້ຄວາມຄືບໜ້າໂດຍລວມຊ້າລົງ.
02
ວິທີແກ້ໄຂ APQ
AGX Orin+Intelມັນສະໝອງນ້ອຍ ແລະ ສະໝອງນ້ອຍ"ສະຖາປັດຕະຍະກຳຮ່ວມມື"
1. ໄລຍະການອອກແບບໂຄງການ (ເດືອນຕຸລາ 2025)
ການຈັດວາງຄວາມຕ້ອງການ:
ຮ່ວມກັນທົບທວນຄືນຄວາມຕ້ອງການຫຼັກ 13 ຢ່າງ, ລວມທັງຄວາມຖີ່ຂອງການຄວບຄຸມການຍ່າງແບບເວລາຈິງ ≥ 1kHz, ຄວາມຖືກຕ້ອງຂອງການຊິ້ງໂຄຣໄນສ໌ຫຼາຍເຊັນເຊີ ≤ 40 μ s, ຮອງຮັບ ROS 2 ແລະ middleware ແບບກຳນົດເອງແບບສອງໂໝດ, ແລະອື່ນໆ.
ການປັບແຕ່ງໂຄງການ:
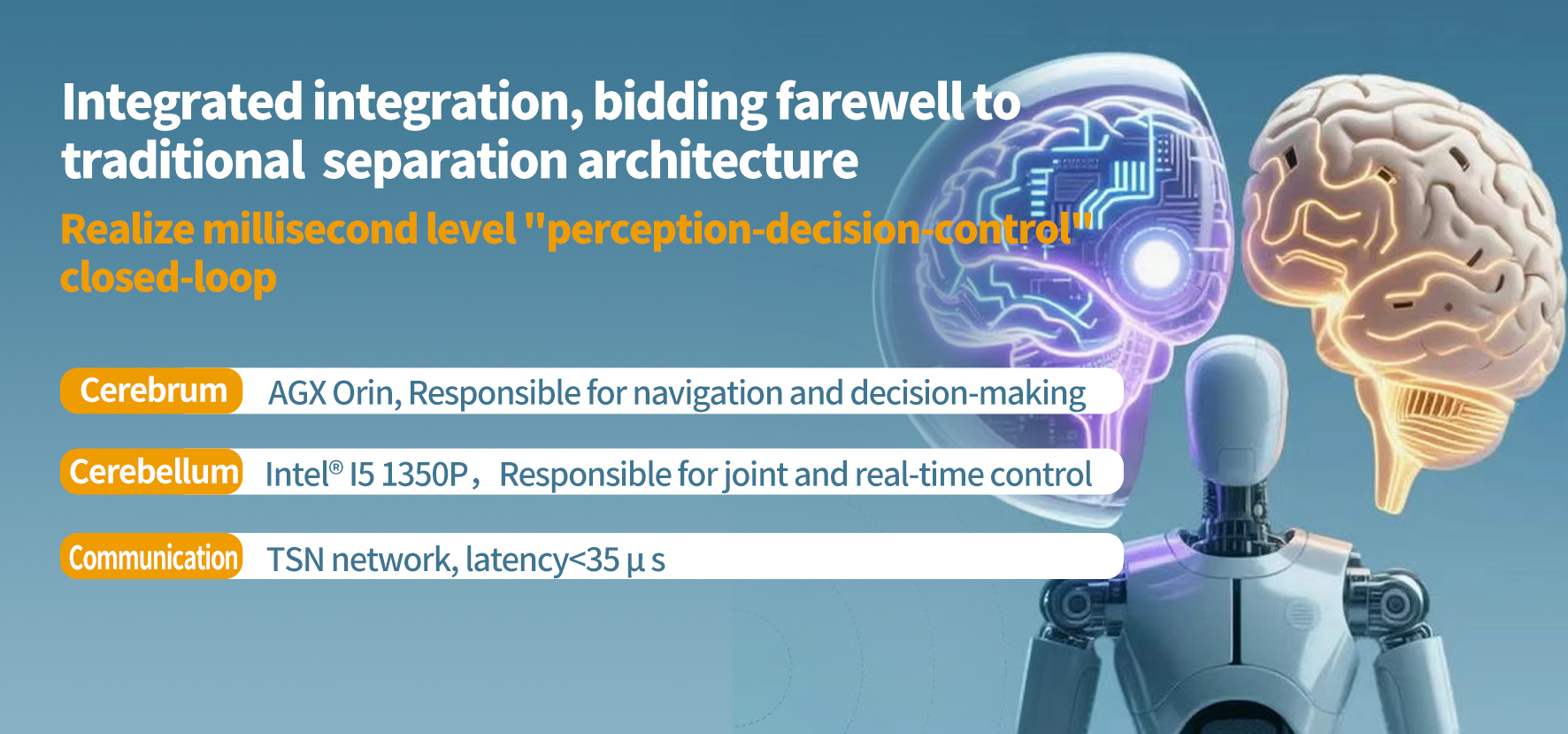
- ຊັ້ນຄວບຄຸມຫຼັກຮັບຮອງເອົາ AGX Orin + Intelມັນສະໝອງນ້ອຍ ແລະ ສະໝອງນ້ອຍຕົວຄວບຄຸມການລວມຕົວ, ການເຊື່ອມໂຍງໜ່ວຍຕັດສິນໃຈປະສິດທິພາບສູງ x86 ແລະ ໜ່ວຍຄວບຄຸມແບບເວລາຈິງ, ບັນລຸການເຊື່ອມໂຍງຂອງ "ການຮັບຮູ້-ການຕັດສິນໃຈ-ການຄວບຄຸມ".
- ນຳໃຊ້ Intel I5 1350P ເປັນໂປເຊດເຊີຮ່ວມໃນຊັ້ນການປະຕິບັດ, ຮັບຜິດຊອບການຄວບຄຸມ servo ແລະ ການປັບຕົວໃນທ້ອງຖິ່ນຂອງ 28 ຂໍ້ຕໍ່.
- ການສື່ສານແມ່ນອີງໃສ່ Gigabit TSN (Time Sensitive Network), ຮັບປະກັນວ່າຄວາມຊັກຊ້າລະຫວ່າງ AGX Orin ແລະ cerebellum x86 ແມ່ນໜ້ອຍກວ່າ 35 μ s.
2. ໄລຍະການນຳໃຊ້ຢ່າງວ່ອງໄວ (ເດືອນພະຈິກ-ທັນວາ 2025)
- ຮາດແວສຽບແລະຫຼິ້ນໄດ້:ອິນເຕີເຟດໄຟຟ້າມາດຕະຖານສາມາດປັບຕົວເຂົ້າກັບໄດຣຟ໌ servo ແລະເຊັນເຊີທີ່ມີຢູ່ຂອງລູກຄ້າໄດ້ໂດຍກົງ, ເຊິ່ງຊ່ວຍຫຼຸດຜ່ອນເວລາໃນການປັບແຕ່ງສາຍໄຟ.
- ຊອບແວທີ່ພ້ອມທີ່ຈະໃຊ້ທັນທີ:ລະບົບ Ubuntu 22.04 ແລະ ROS 2 ທີ່ຕິດຕັ້ງໄວ້ລ່ວງໜ້າ, ຊຸດໜ້າທີ່ພື້ນຖານຂອງຫຸ່ນຍົນສອງຕີນໃນຕົວ, ລູກຄ້າສາມາດຕັ້ງຄ່າການເຄື່ອນໄຫວພື້ນຖານໃຫ້ສຳເລັດພາຍໃນ 3 ມື້.
- ການແກ້ໄຂບັນຫາຮ່ວມກັນທີ່ມີປະສິດທິພາບ:APQ ໃຫ້ການສະໜັບສະໜູນສາຍຄູ່ "ໃນສະຖານທີ່ + ໄລຍະໄກ" ເພື່ອແກ້ໄຂບັນຫາຕ່າງໆເຊັ່ນ: ການປັບທຽບເຊັນເຊີຢ່າງວ່ອງໄວ, ເຊິ່ງຊ່ວຍຫຼຸດຜ່ອນເວລາການດີບັກຢູ່ໃນສະຖານທີ່ໄດ້ຢ່າງຫຼວງຫຼາຍ.
03
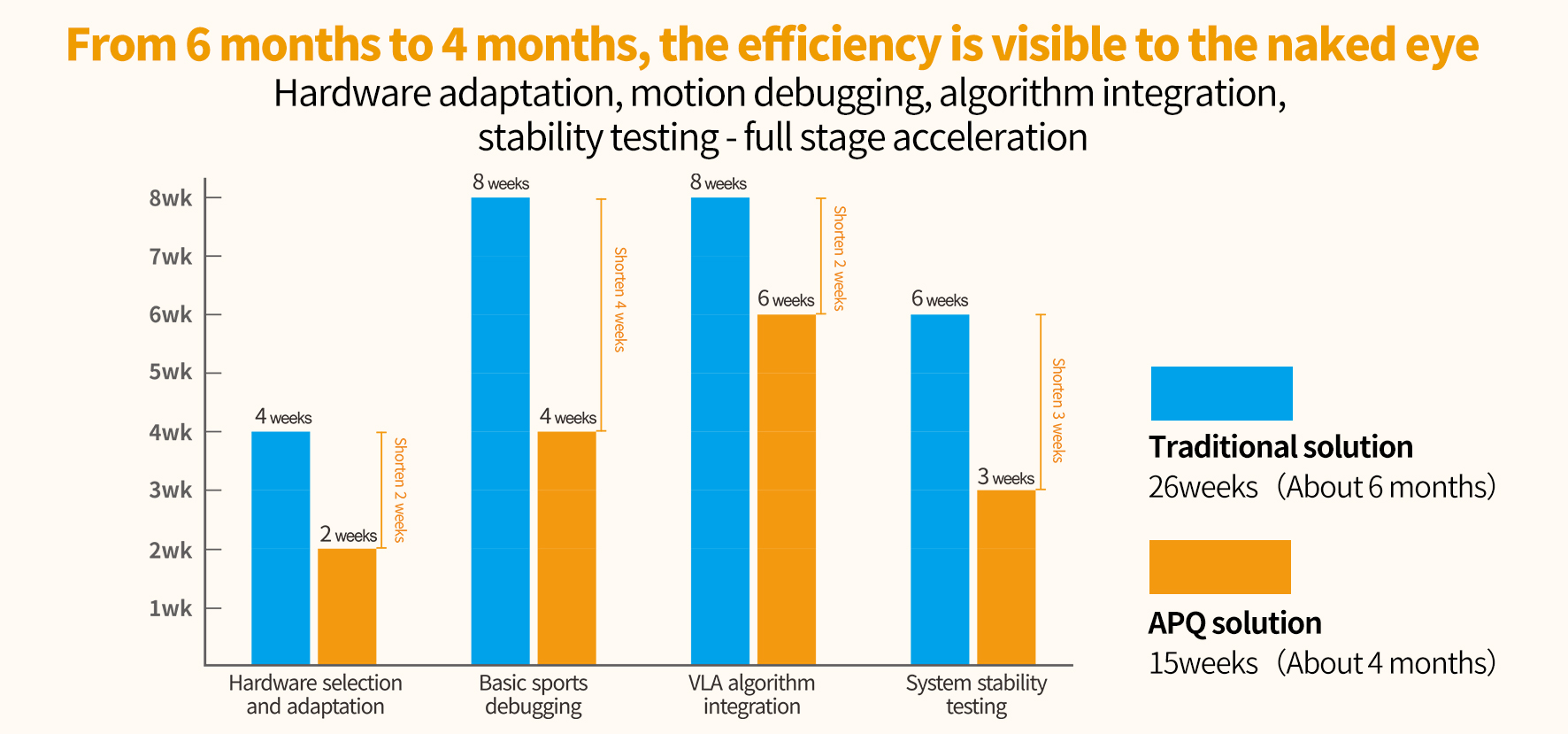
ຜົນສຳເລັດຫຼັກ: ວົງຈອນການພັດທະນາສັ້ນລົງ 40%
ການປຽບທຽບໄລຍະເວລາການພັດທະນາ
ການປັບປຸງປະສິດທິພາບທີ່ສຳຄັນ
- ການຄວບຄຸມເວລາຈິງ:ວົງຈອນການຄວບຄຸມການຍ່າງໄດ້ເພີ່ມຂຶ້ນຈາກ 5 ມິນລິວິນາທີ ເປັນ 1 ມິນລິວິນາທີ, ແລະ ຄວາມໄວໃນການຕອບສະໜອງຕໍ່ຄວາມສົມດຸນແບບໄດນາມິກໄດ້ເພີ່ມຂຶ້ນ 80%.
- ປະສິດທິພາບຂອງການພັດທະນາ:ຄວາມໄວໃນການເຮັດຊ້ຳອັລກໍຣິທຶມໄດ້ຮັບການປັບປຸງໃຫ້ດີຂຶ້ນ, ແລະ ລູກຄ້າສາມາດເຮັດສຳເລັດການກວດສອບການຈຳລອງດ້ວຍເຄື່ອງຈັກຕົວຈິງຂອງການຍ່າງໃໝ່ພາຍໃນ 7 ມື້ (ຕາມປະເພນີມັນໃຊ້ເວລາ 20 ມື້).
- ຄວາມໝັ້ນຄົງຂອງລະບົບ:ການທົດສອບການໂຫຼດຢ່າງຕໍ່ເນື່ອງ 72 ຊົ່ວໂມງໂດຍບໍ່ມີຂໍ້ບົກພ່ອງ, MTBF (ເວລາສະເລ່ຍລະຫວ່າງຄວາມລົ້ມເຫຼວ) ເພີ່ມຂຶ້ນເປັນ 1000 ຊົ່ວໂມງ.
04
ຄຳຕິຊົມຂອງລູກຄ້າ ແລະ ຄວາມເຂົ້າໃຈຂອງອຸດສາຫະກຳ
ການປະເມີນຜົນຂອງຜູ້ອຳນວຍການຝ່າຍເຕັກນິກຂອງລູກຄ້າ
ຄຳຖາມ APມັນສະໝອງນ້ອຍ ແລະ ສະໝອງນ້ອຍ"ສະຖາປັດຕະຍະກຳແກ້ໄຂບັນຫາຂອງການພັດທະນາຫຸ່ນຍົນໄດ້ຢ່າງແທ້ຈິງ. AGX Orin ຊ່ວຍໃຫ້ພວກເຮົາສາມາດໃຊ້ອັລກໍຣິທຶມການນຳທາງທີ່ສັບສົນໄດ້ຢ່າງວ່ອງໄວ, ໃນຂະນະທີ່ cerebellum ຂອງ Intel ຮັບປະກັນການຄວບຄຸມລະດັບຮ່ວມກັນໃນເວລາຈິງ. ອິນເຕີເຟດມາດຕະຖານຊ່ວຍໃຫ້ພວກເຮົາສາມາດແຍກອອກຈາກການພັດທະນາໄດຣເວີລະດັບຕໍ່າ ແລະ ສຸມໃສ່ນະວັດຕະກໍາອັລກໍຣິທຶມລະດັບສູງກວ່າ."
ຄວາມເຂົ້າໃຈກ່ຽວກັບອຸດສາຫະກໍາ
1. ການອອກແບບແບບປະສົມປະສານກຳລັງກາຍເປັນທ່າອ່ຽງ:ໄດ້ມັນສະໝອງ" ແລະ "cerebellum" ຈຳເປັນຕ້ອງຮ່ວມມືກັນຢ່າງເລິກເຊິ່ງ, ແລະສະຖາປັດຕະຍະກຳແຍກຕ່າງຫາກໄດ້ກາຍເປັນຈຸດແຂງຂອງປະສິດທິພາບ.
2. ມາດຕະຖານສ້າງມູນຄ່າ:ມາດຕະຖານຂອງການໂຕ້ຕອບຮາດແວ ແລະ ມິດເດວແວຣ໌ຊອບແວສາມາດຫຼຸດຜ່ອນຄວາມສັບສົນຂອງການເຊື່ອມໂຍງໄດ້ຢ່າງຫຼວງຫຼາຍ.
3. ຮູບແບບໃໝ່ຂອງການຮ່ວມມືດ້ານນິເວດວິທະຍາ:ຜູ້ສະໜອງຄວນຫັນປ່ຽນໄປສູ່ "ຄູ່ຮ່ວມງານແກ້ໄຂບັນຫາ" ແລະ ມີສ່ວນຮ່ວມຢ່າງເລິກເຊິ່ງໃນການພັດທະນາລູກຄ້າໃນໄລຍະຕົ້ນໆ.
05
ຂໍ້ໄດ້ປຽບຫຼັກຂອງໂຊລູຊັ່ນ APQ
ຂໍ້ໄດ້ປຽບດ້ານເຕັກນິກ
- ສະຖາປັດຕະຍະກຳຟິວຊັນ: AGX Orin + Intelມັນສະໝອງນ້ອຍ ແລະ ສະໝອງນ້ອຍບັນລຸການຕັດສິນໃຈ ແລະ ການຄວບຄຸມຮາດແວແບບລວມສູນ, ຫຼີກລ່ຽງບັນຫາຄໍຂວດຂອງລົດເມຂໍ້ມູນ.
- ການຂະຫຍາຍແບບຍືດຫຍຸ່ນ: ຮອງຮັບການຕັ້ງຄ່າທີ່ແຕກຕ່າງກັນຕັ້ງແຕ່ 12 ຂໍ້ຕໍ່ຫາ 32 ຂໍ້ຕໍ່, ແລະປະສິດທິພາບຂອງ cerebellar ສາມາດຍົກລະດັບເປັນ I7 13700H ໄດ້.
- ລະບົບນິເວດເປີດ: ເຂົ້າກັນໄດ້ຢ່າງເຕັມສ່ວນກັບສະພາບແວດລ້ອມການພັດທະນາສາຍຫຼັກເຊັ່ນ ROS 2, MATLAB/Simulink, ແລະອື່ນໆ.
ຂໍ້ໄດ້ປຽບຂອງການບໍລິການ
- ການຮ່ວມມືແບບວົງຈອນເຕັມຮູບແບບ: ໃຫ້ບໍລິການພັດທະນາຮ່ວມກັນຕັ້ງແຕ່ການອອກແບບວິທີແກ້ໄຂຈົນເຖິງການສະໜັບສະໜູນການຜະລິດຈຳນວນຫຼາຍ.
- ການແບ່ງປັນປະສົບການ: ອີງຕາມປະສົບການການພັດທະນາທີ່ປະສົບຜົນສຳເລັດຂອງລູກຄ້າຫຸ່ນຍົນຫຼາຍກວ່າ 50 ຄົນ, ພວກເຮົາຊ່ວຍພວກເຂົາໃຫ້ກ້າວໄປຂ້າງໜ້າຢ່າງວ່ອງໄວ.
- ການຕອບສະໜອງໄວ: ການວິນິດໄສທາງໄກ 7 × 24 ຊົ່ວໂມງ + ການສະໜັບສະໜູນຢູ່ໃນສະຖານທີ່ 48 ຊົ່ວໂມງເພື່ອຮັບປະກັນການຈັດຕັ້ງປະຕິບັດໂຄງການຢ່າງລາບລື່ນ.

ໃນຍຸກອຸດສາຫະກຳຫຸ່ນຍົນທີ່ເລັ່ງລັດໃນປະຈຸບັນ, ປະສິດທິພາບໃນການພັດທະນາໄດ້ກາຍເປັນກຸນແຈສຳຄັນໃນການແຂ່ງຂັນ. ຜ່ານສະຖາປັດຕະຍະກຳການຮ່ວມມືຂອງ "ມັນສະໝອງນ້ອຍ ແລະ ສະໝອງນ້ອຍ" ແລະ ການບໍລິການທີ່ເລິກເຊິ່ງ, APQ ບໍ່ພຽງແຕ່ຊ່ວຍໃຫ້ລູກຄ້າບັນລຸການຫຼຸດຜ່ອນ 40% ໃນວົງຈອນການພັດທະນາເທົ່ານັ້ນ, ແຕ່ຍັງຢືນຢັນຄຸນຄ່າທີ່ສຳຄັນຂອງການອອກແບບປະສົມປະສານໃນລະບົບຫຸ່ນຍົນທີ່ສັບສົນ. ພວກເຮົາຫວັງວ່າຈະໄດ້ເຮັດວຽກຮ່ວມກັບຄູ່ຮ່ວມງານຫຼາຍຂຶ້ນເພື່ອຮ່ວມກັນສົ່ງເສີມການມາຮອດຂອງຍຸກສະຕິປັນຍາທີ່ມີລັກສະນະເປັນຕົວຕົນ.
ຖ້າທ່ານສົນໃຈບໍລິສັດ ແລະ ຜະລິດຕະພັນຂອງພວກເຮົາ, ກະລຸນາຕິດຕໍ່ຫາຕົວແທນຕ່າງປະເທດຂອງພວກເຮົາ, Robin.
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
ເວລາໂພສ: ມັງກອນ-09-2026