![[Bransjeeksempel] Utviklingssyklusen for tobent humanoidrobot forkortet med 40 %! Hvordan ledende integratorer oppnår raske gjennombrudd med APQs løsning for «hjerne og lillehjerne»](/style/global/img/img_45.jpg)
Fra oktober 2025 til januar 2026 samarbeidet en ledende innenlandsk integrator av humanoide roboter tett med APQ. Basert på AGX Orin + Intels samarbeidsarkitektur «hjerne og lillehjerne» fullførte de utviklingen og feilsøkingen av en ny generasjons tobent humanoid robotprototype innenbare fire måneder, noe som reduserer den totale utviklingssyklusen med 40 % sammenlignet med tradisjonelle metoder.
01
Kundebakgrunn og kjerneutfordringer
Kundeprofil
En ledende innenlandsk bedrift innen forskning og integrering av tobente humanoide roboter, med fokus på feltet avanserte bioniske roboter, med produkter som dekker flere scenarier som vitenskapelig forskning og utdanning, spesialoperasjoner og kommersielle tjenester.
Kjernesmertepunkt
- Lang utviklingssyklus:I tradisjonelle løsninger leveres moduler som bevegelseskontroll, miljøpersepsjon og beslutningsplanlegging av forskjellige leverandører, og integrasjonsfeilsøking tar opptil 8–12 måneder.
- Vanskeligheter med systemsamarbeid:Tobeinte roboter trenger «hjernen» (beslutningstaking) og «hjernen» (kontroll) for å oppnå samarbeid på millisekundnivå, og tradisjonell separasjonsarkitektur har vanskelig for å støtte effektiv interaksjon mellom sanntidsbalanse og multimodal bevissthet.
- Høye kostnader for algoritmemigrering:Migrering og optimalisering av algoritmer fra simulering til virkelige maskiner krever ofte gjentatt tilpasning til forskjellige maskinvaregrensesnitt, noe som bremser den generelle fremdriften.
02
APQ-løsning
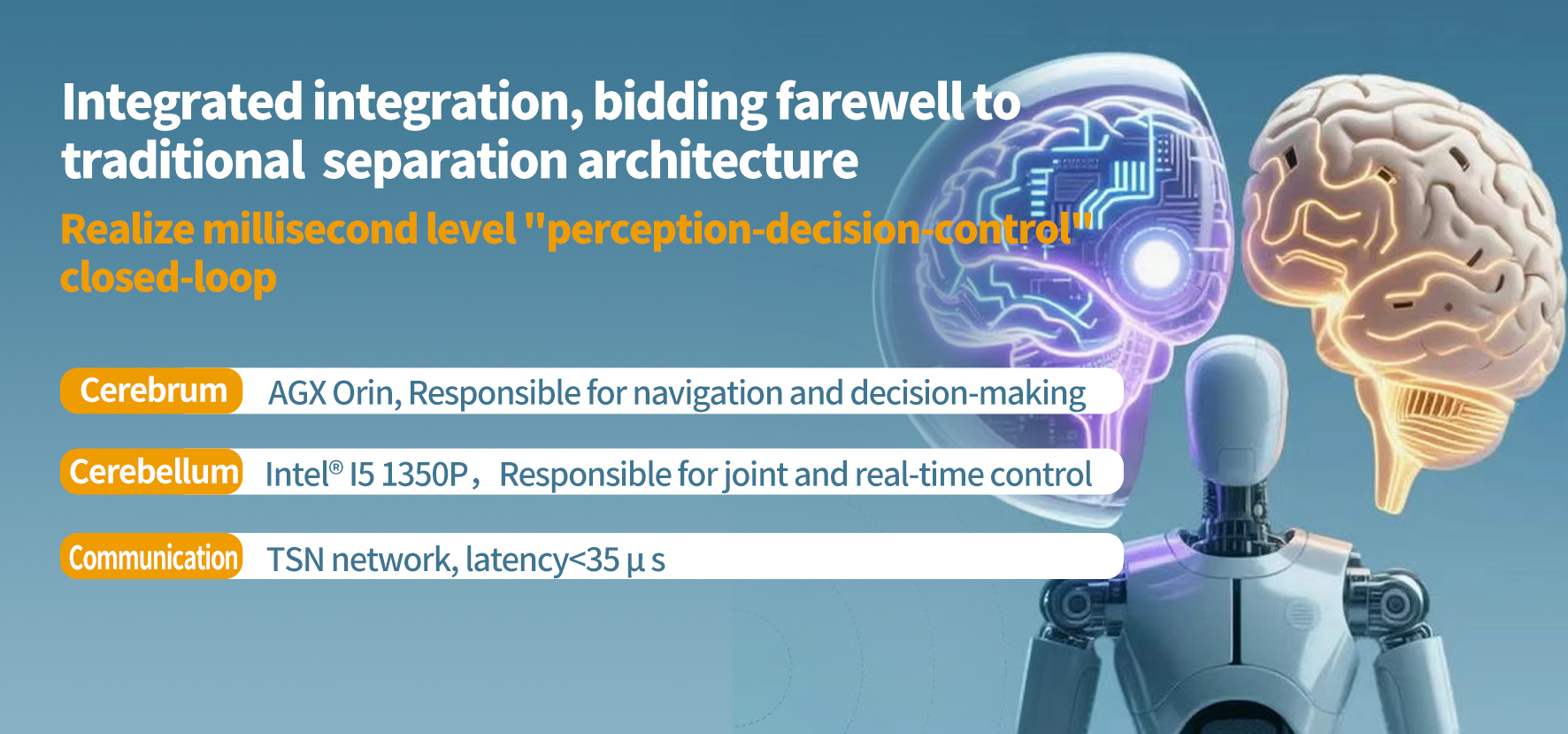
AGX Orin+Intelstorhjernen og lillehjernen"Samarbeidsarkitektur"
1. Planleggingsfase (oktober 2025)
Kravjustering:
Gjennomgå i fellesskap 13 kjernekrav, inkludert sanntids gangkontrollfrekvens ≥ 1 kHz, synkroniseringsnøyaktighet for flere sensorer ≤ 40 μs, støtte for ROS 2 og tilpasset mellomvare med dobbeltmodus, osv.
Tilpasning av skjema:
- Hovedkontrolllaget bruker AGX Orin + Intelstorhjernen og lillehjernenfusjonskontroller, som integrerer x86 høyytelsesbeslutningsenhet og sanntidskontrollenhet, og oppnår integrering av "persepsjon-beslutning-kontroll".
- Implementer Intel I5 1350P som en felles koprosessor i utførelseslaget, ansvarlig for servokontroll og lokal adaptiv justering av 28 ledd.
- Kommunikasjonen er basert på Gigabit TSN (Time Sensitive Network), som sikrer at latensen mellom AGX Orin og x86 lillehjernen er mindre enn 35 μs.
2. Rask utplasseringsfase (november–desember 2025)
- Maskinvare plug-and-play:Standard elektriske grensesnitt tilpasses direkte til kundenes eksisterende servostasjoner og sensorer, noe som reduserer tiden det tar å tilpasse kabelen.
- Klar til bruk programvare rett ut av esken:Forhåndsinstallerte Ubuntu 22.04- og ROS 2-systemer, innebygd tobent robot grunnleggende funksjonspakke, kunder kan fullføre grunnleggende bevegelseskonfigurasjon innen 3 dager.
- Effektiv samarbeidende feilsøking:APQ tilbyr støtte med to linjer «på stedet + ekstern» for raskt å løse problemer som sensorkalibrering, noe som reduserer feilsøkingstiden på stedet betraktelig.
03
Viktigste prestasjon: Utviklingssyklusen ble forkortet med 40 %
Sammenligning av utviklingstidslinjer
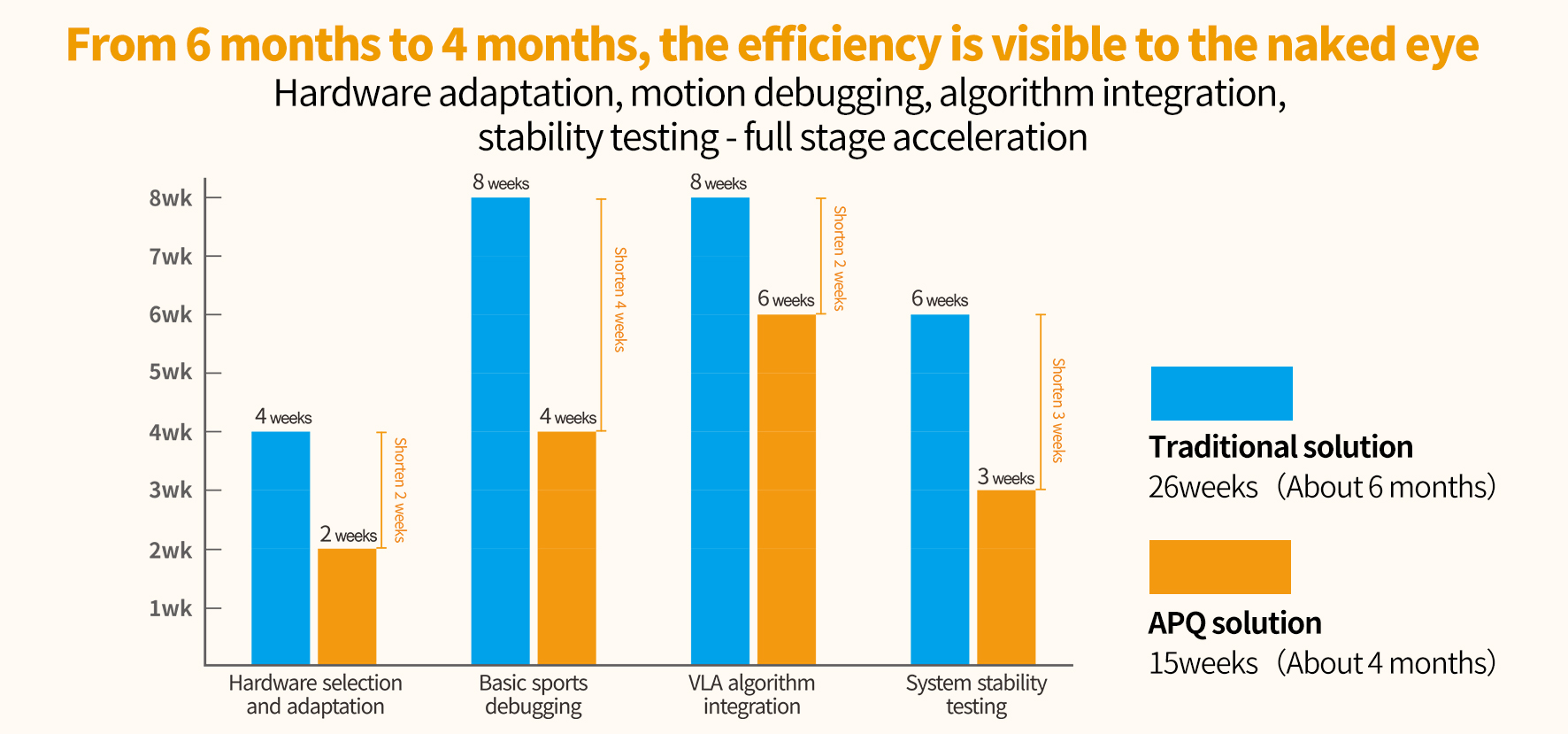
Betydelig forbedring av ytelsen
- Kontroll i sanntid:Gangkontrollsyklusen er økt fra 5 ms til 1 ms, og den dynamiske balanseresponshastigheten er økt med 80 %.
- Utviklingseffektivitet:Algoritmerens iterasjonshastighet er forbedret, og kunder kan fullføre simuleringen av den nye gangen med en reell maskin innen 7 dager (tradisjonelt tar det 20 dager).
- Systemstabilitet:Kontinuerlig 72-timers belastningstest uten feil, MTBF (gjennomsnittlig tid mellom feil) økt til 1000 timer.
04
Kundetilbakemeldinger og bransjeinnsikt
Evaluering av kundeteknisk direktør
APQ-erstorhjernen og lillehjernen«Arkitektur løser virkelig smertepunktene ved robotutvikling. AGX Orin lar oss raskt kjøre komplekse navigasjonsalgoritmer, mens Intels lillehjerne sikrer kontroll på leddnivå i sanntid. Standardiserte grensesnitt lar oss bryte bort fra lavnivådriverutvikling og fokusere mer på algoritminnovasjon på øvre nivå.»
Bransjeinnsikt
1. Integrert design er i ferd med å bli en trend:den "storhjernen" og "lillehjernen" må samarbeide tett, og en separat arkitektur har blitt en flaskehals i effektiviteten.
2. Standardisering skaper verdi:Standardisering av maskinvaregrensesnitt og programvaremellomvare kan redusere integrasjonskompleksiteten betydelig.
3. Ny modell for økologisk samarbeid:Leverandører bør bli «løsningspartnere» og delta dypt i tidlig kundeutvikling.
05
Kjernefordeler med APQ-løsningen
Teknisk fordel
- Fusjonsarkitektur: AGX Orin+Intelstorhjernen og lillehjernenoppnå enhetlig beslutningstaking og kontroll i maskinvare, og unngå flaskehalser i databussen.
- Elastisk ekspansjon: Støtter forskjellige konfigurasjoner fra 12 ledd til 32 ledd, og lillehjernens ytelse kan oppgraderes til I7 13700H.
- Åpent økosystem: fullt kompatibelt med vanlige utviklingsmiljøer som ROS 2, MATLAB/Simulink, osv.
Servicefordeler
- Fullstendig samarbeid: tilbyr felles utviklingstjenester fra løsningsdesign til masseproduksjonsstøtte.
- Erfaringsdeling: Basert på den vellykkede utviklingserfaringen til over 50 robotklienter, hjelper vi dem med å komme raskt videre.
- Rask respons: 7 × 24-timers fjerndiagnose + 48-timers support på stedet for å sikre problemfri gjennomføring av prosjektet.

I dagens akselererende industrialisering av robotikk har utviklingseffektivitet blitt nøkkelen til konkurranse. Gjennom den samarbeidende arkitekturen til "storhjernen og lillehjernen"og omfattende tjenester, hjelper APQ ikke bare kunder med å oppnå en 40 % reduksjon i utviklingssykluser, men bekrefter også den viktige verdien av integrert design i komplekse robotsystemer. Vi ser frem til å samarbeide med flere partnere for å i fellesskap fremme ankomsten av den kroppsliggjorte intelligens-æraen."
Hvis du er interessert i vårt selskap og våre produkter, kan du gjerne kontakte vår utenlandske representant, Robin.
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
Publisert: 09.01.2026