
Odată cu popularizarea rapidă a roboților inteligenți în prezent, cerințele operaționale ale roboților în inspecția incendiilor, recepția serviciilor, depozitarea și manipularea în medii complexe sunt din ce în ce mai mari. Acești roboți nu numai că trebuie să îndeplinească sarcini de mobilitate de bază, dar necesită și capacități inteligente, cum ar fi percepția mediului, luarea deciziilor în timp real și colaborarea cu mai mulți roboți. Un controler fiabil, de înaltă performanță și adaptabil a devenit cheia pentru a stabili dacă roboții pot fi implementați stabil în diverse scenarii.
Trei provocări majore în implementarea scenariilor multiple

În implementarea practică, sistemele de control al roboților se confruntă adesea cu trei provocări principale:
Anxietatea legate de puterea de calcul:Sarcinile IA, cum ar fi recunoașterea vizuală, cartografierea SLAM și planificarea traseelor, necesită o putere de calcul extrem de mare, iar controlerele tradiționale nu sunt capabile să îndeplinească cerințele de răspuns în timp real;
Blocaj de expansiune:Există diverse tipuri de periferice, cum ar fi LiDAR, camere multiple, senzori cu ultrasunete, module de comunicare 5G etc., iar numărul și tipurile de interfețe au devenit blocaje în integrare;
Mediul este dur:Diferențele de temperatură exterioară, fluctuațiile de tensiune din amplasamentele industriale, vibrațiile cauzate de praf și alți factori de mediu reprezintă o provocare serioasă pentru funcționarea stabilă pe termen lung a echipamentelor.
TAC-3000 Pro: Injectarea unui „nucleu all-in-one” în roboți

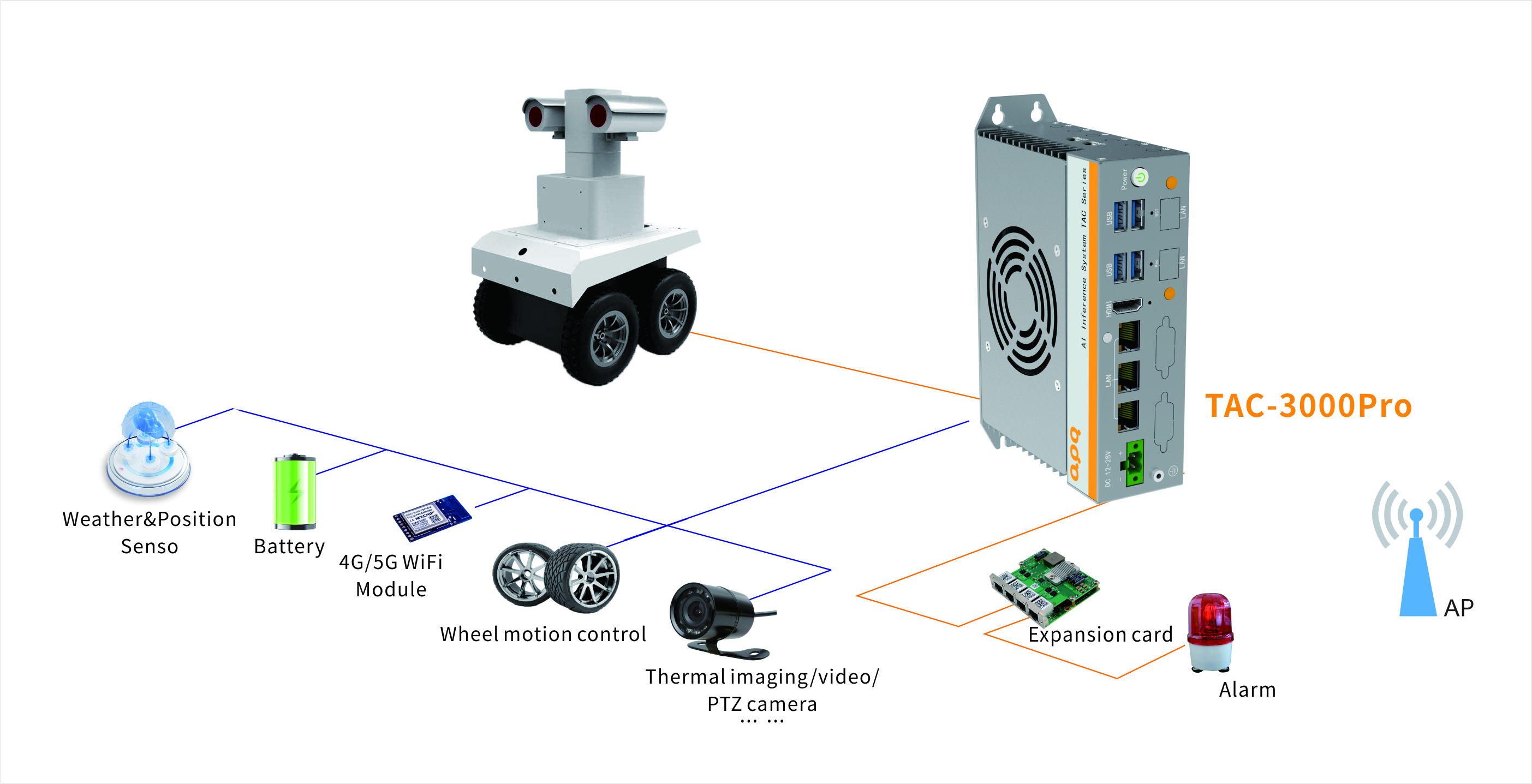
APQ-ulTAC-3000 Prose concentrează pe „putere de calcul puternică, interfețe multiple, fiabilitate ridicată și integrare ușoară”, oferind roboților o bază de control inteligentă cu adevărat industrială:
Platformă de calcul puternică:echipat cuSeria NVIDIA ® Jetson Orin Nano/NXmodulul, suportă modul Super, cu o putere de calcul AI de până la 157 TOPS, capabil să gestioneze cu ușurință sarcini cu încărcare mare, cum ar fi navigarea și evitarea obstacolelor, recunoașterea vizuală, planificarea mișcării etc.;
Interfețe de extindere bogate:Oferă3 porturi Gigabit Ethernet, 4 porturi USB, 1 porturi HDMI,susține4 x RS232/RS485, CAN FD, GPIOși alte extensii, compatibile cu extensii 5G/4G, Wi-Fi și acces facil la mai multe tipuri de senzori și module de comunicare;
Design durabil și fiabil:SuporturiIntrare CC cu tensiune largă de 12-28V, intervalul de temperatură de funcționare de-20 ℃~60 ℃, corp complet metalic și disipare activă a căldurii cu ventilator, potrivit pentru medii industriale, cum ar fi vibrații și umiditate ridicată;
Metodă flexibilă de instalare:Suportă instalare pe șină DIN și cu suport pentru urechi suspendate, dimensiuni compacte (150,7 × 114,5 × 45 mm), ușor de integrat în diverse structuri de roboți.
O experiență robotică mai inteligentă, mai integrată și mai fiabilă
- Puterea mare de calcul permite navigarea precisă, evitarea dinamică a obstacolelor și monitorizarea mediului în timp real, îmbunătățind acuratețea și viteza de răspuns a operațiunilor robotului;
- Designul cu interfețe multiple reduce costurile de comutare și extindere externă, accelerează ciclurile de integrare și depanare a sistemului;
- Intervalul larg de temperatură și presiune, precum și structura robustă, asigură funcționarea stabilă pe termen lung a robotului în scenarii precum stingerea incendiilor, inspecția și AGV-urile în aer liber, reducând frecvența întreținerii.

APQ TAC-3000 Pro nu este doar un controler hardware, ci și o „platformă de capabilități” pentru inteligența roboților și dezvoltarea mai multor scenarii. Acesta ajută roboții să funcționeze stabil și eficient în medii complexe prin intermediul calculului de înaltă performanță, scalabilității flexibile și fiabilității de nivel industrial, asistând întreprinderile în accelerarea tranziției roboților de la „mobil” la „inteligent” și de la „testare într-un singur punct” la „implementare la scară largă”.
Data publicării: 25 decembrie 2025