![[Primer iz industrije] Razvojni cikel dvonožnega humanoidnega robota skrajšan za 40 %! Kako vodilni integratorji dosegajo hitre preboje z rešitvijo APQ za »moški in mali možgani«](/style/global/img/img_45.jpg)
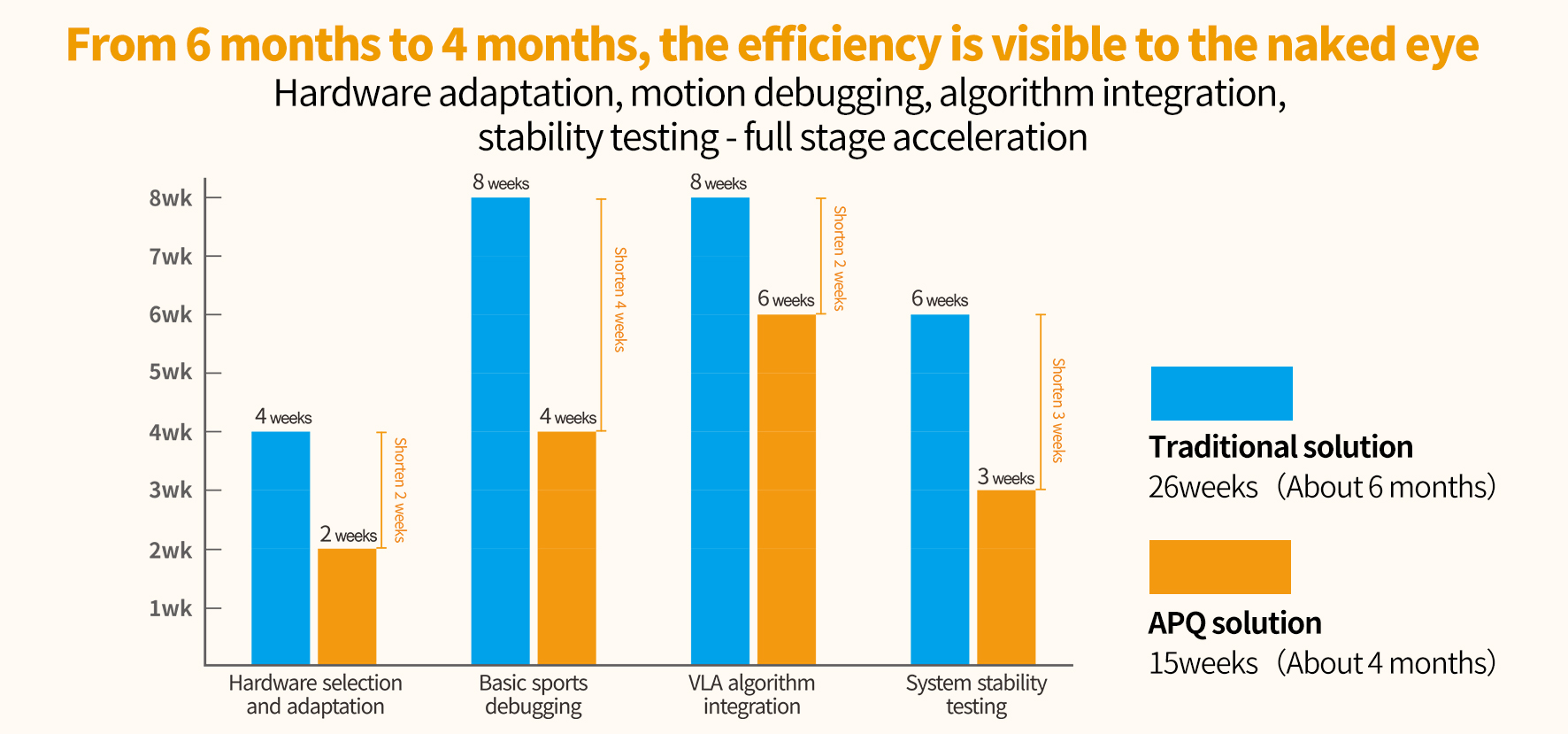
Od oktobra 2025 do januarja 2026 je vodilni domači integrator humanoidnih robotov tesno sodeloval s podjetjem APQ. Na podlagi sodelovalne arhitekture AGX Orin + Intel "cerebrum and cerebellum" so zaključili razvoj in odpravljanje napak prototipa dvonožnega humanoidnega robota nove generacije.samo štiri mesece, kar skrajša celoten razvojni cikel za 40 % v primerjavi s tradicionalnimi metodami.
01
Ozadje strank in ključni izzivi
Profil stranke
Vodilno domače podjetje na področju raziskav in integracije dvonožnih humanoidnih robotov, s poudarkom na področju vrhunskih bioničnih robotov, s produkti, ki pokrivajo več scenarijev, kot so znanstvene raziskave in izobraževanje, posebne operacije in komercialne storitve.
Osrednja bolečinska točka
- Dolg razvojni cikel:V tradicionalnih rešitvah module, kot so nadzor gibanja, zaznavanje okolja in načrtovanje odločanja, zagotavljajo različni dobavitelji, odpravljanje napak v integraciji pa traja do 8–12 mesecev.
- Težave pri sodelovanju v sistemu:Dvonožni roboti potrebujejo "velike možgane" (odločanje) in "male možgane" (nadzor), da dosežejo sodelovanje na milisekundni ravni, tradicionalna arhitektura ločevanja pa težko podpira učinkovito interakcijo med ravnotežjem v realnem času in multimodalno ozaveščenostjo.
- Visoki stroški migracije algoritmov:Migracija in optimizacija algoritmov iz simulacije v resnični stroj pogosto zahtevata ponavljajoče se prilagajanje različnim strojnim vmesnikom, kar upočasni celoten napredek.
02
Rešitev APQ
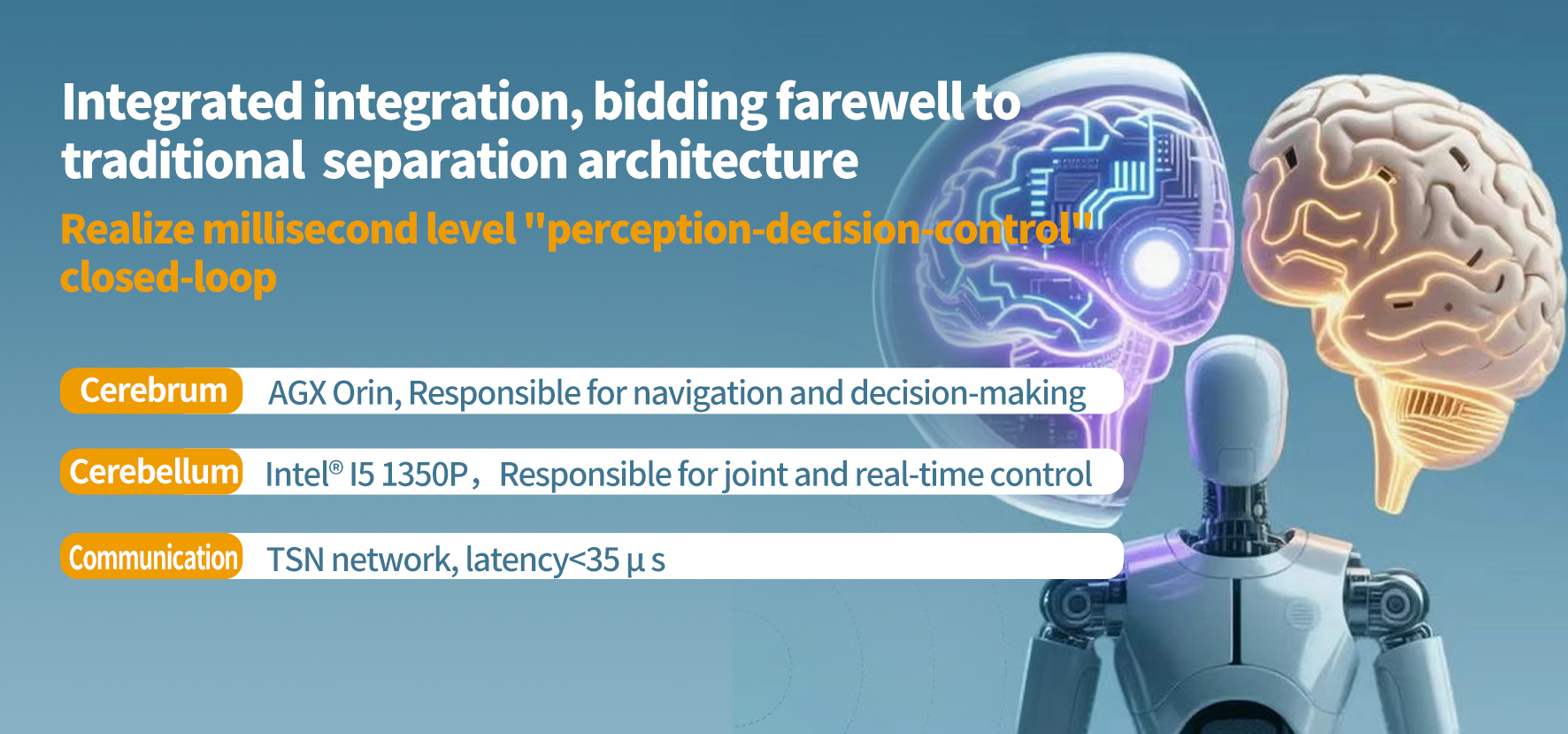
AGX Orin+Intelmožgani in mali možgani"Sodelovalna arhitektura"
1. Faza načrtovanja sheme (oktober 2025)
Usklajevanje zahtev:
Skupni pregled 13 ključnih zahtev, vključno s frekvenco nadzora hoje v realnem času ≥ 1 kHz, natančnostjo sinhronizacije več senzorjev ≤ 40 μs, podporo za ROS 2 in dvojni način delovanja vmesne programske opreme po meri itd.
Prilagoditev sheme:
- Glavna nadzorna plast uporablja AGX Orin+Intelmožgani in mali možganifuzijski krmilnik, ki integrira visokozmogljivo odločitveno enoto x86 in krmilno enoto v realnem času, s čimer doseže integracijo "zaznavanja-odločanja-nadzora".
- V izvedbeni plasti namestite Intel I5 1350P kot skupni koprocesor, ki je odgovoren za servo krmiljenje in lokalno prilagodljivo prilagajanje 28 sklepov.
- Komunikacija temelji na gigabitnem TSN (časovno občutljivem omrežju), kar zagotavlja, da je latenca med AGX Orinom in malim mozgom x86 manjša od 35 μs.
2. Faza hitrega uvajanja (november–december 2025)
- Strojna oprema »priklopi in uporabljaj«:Standardni električni vmesniki se neposredno prilagajajo obstoječim servo pogonom in senzorjem strank, kar skrajša čas prilagajanja kablov.
- Programska oprema, pripravljena za uporabo takoj po nakupu:Prednameščena sistema Ubuntu 22.04 in ROS 2, vgrajen osnovni paket funkcij dvonožnega robota, stranke lahko osnovno konfiguracijo gibanja dokončajo v 3 dneh.
- Učinkovito skupno odpravljanje napak:APQ nudi podporo »na lokaciji + na daljavo« z dvema linijama za hitro reševanje težav, kot je kalibracija senzorjev, kar močno skrajša čas odpravljanja napak na lokaciji.
03
Ključni dosežek: Razvojni cikel skrajšan za 40 %
Primerjava razvojnih časovnic
Znatno izboljšanje zmogljivosti
- Nadzor v realnem času:Cikel nadzora hoje se je povečal s 5 ms na 1 ms, hitrost odziva dinamičnega ravnotežja pa se je povečala za 80 %.
- Učinkovitost razvoja:Hitrost iteracije algoritma je bila izboljšana, stranke pa lahko simulacijo nove hoje v realnem stroju preverijo v 7 dneh (tradicionalno traja 20 dni).
- Stabilnost sistema:Neprekinjen 72-urni obremenitveni test brez napak, MTBF (povprečni čas med napakami) se je povečal na 1000 ur.
04
Povratne informacije strank in vpogledi v panogo
Ocena tehničnega direktorja za stranke
APQ-jimožgani in mali možgani„Arhitektura resnično rešuje težavne točke razvoja robotov. AGX Orin nam omogoča hitro izvajanje kompleksnih navigacijskih algoritmov, Intelov mali možgani pa zagotavljajo nadzor na ravni sklepov v realnem času. Standardizirani vmesniki nam omogočajo, da se odmaknemo od razvoja gonilnikov na nizki ravni in se bolj osredotočimo na inovacije algoritmov na višji ravni.“
Vpogledi v panogo
1. Celostno oblikovanje postaja trend:"možgani" in "mali možgani" morata tesno sodelovati, ločena arhitektura pa je postala ozko grlo učinkovitosti.
2. Standardizacija ustvarja vrednost:Standardizacija strojnih vmesnikov in vmesne programske opreme lahko znatno zmanjša kompleksnost integracije.
3. Nov model ekološkega sodelovanja:Dobavitelji bi se morali preobraziti v "partnerje za rešitve" in dejavno sodelovati v zgodnjem razvoju strank.
05
Ključne prednosti rešitve APQ
Tehnična prednost
- Fuzijska arhitektura: AGX Orin+Intelmožgani in mali možganidoseči enotno odločanje in nadzor strojne opreme ter se izogniti ozkim grlom na podatkovnem vodilu.
- Elastična ekspanzija: Podpira različne konfiguracije od 12 do 32 sklepov, delovanje malih možganov pa je mogoče nadgraditi na I7 13700H.
- Odprt ekosistem: popolnoma združljiv z glavnimi razvojnimi okolji, kot so ROS 2, MATLAB/Simulink itd.
Prednosti storitve
- Celoten cikel sodelovanja: zagotavljanje skupnih razvojnih storitev od zasnove rešitev do podpore množični proizvodnji.
- Izmenjava izkušenj: Na podlagi uspešnih razvojnih izkušenj več kot 50 strank z roboti jim pomagamo pri hitrem napredovanju.
- Hiter odziv: 7 × 24-urna oddaljena diagnoza + 48-urna podpora na kraju samem za nemoteno izvedbo projekta.

V današnji pospešeni industrializaciji robotike je učinkovitost razvoja postala ključ do konkurence. Skozi sodelovalno arhitekturo "možgani in mali možgani" in poglobljene storitve, APQ ne le pomaga strankam doseči 40-odstotno skrajšanje razvojnih ciklov, temveč tudi potrjuje pomembno vrednost integriranega načrtovanja v kompleksnih robotskih sistemih. Veselimo se sodelovanja z več partnerji, da bi skupaj spodbujali prihod dobe utelešene inteligence."
Če vas zanima naše podjetje in izdelki, se obrnite na našega predstavnika v tujini, Robina.
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
Čas objave: 9. januar 2026