![[Kaso sa Industriya] Pinaikli ng 40% ang Siklo ng Pag-develop ng Bipedal Humanoid Robot! Paano Nakakamit ng mga Nangungunang Integrator ang Mabilis na Pagsulong gamit ang Solusyong “cerebrum at cerebellum” ng APQ](/style/global/img/img_45.jpg)
Mula Oktubre 2025 hanggang Enero 2026, isang nangungunang domestic humanoid robot integrator ang malapit na nakipagtulungan sa APQ. Batay sa AGX Orin + Intel "cerebrum and cerebellum" collaborative architecture, natapos nila ang pagbuo at pag-debug ng isang bagong henerasyong bipedal humanoid robot prototype sa loob ng...apat na buwan lamang, na binabawasan ang pangkalahatang siklo ng pag-unlad ng 40% kumpara sa mga tradisyonal na pamamaraan.
01
Kaligiran ng customer at mga pangunahing hamon
Profile ng Kustomer
Isang nangungunang lokal na negosyo sa pananaliksik at integrasyon ng mga bipedal humanoid robot, na nakatuon sa larangan ng mga high-end bionic robot, na may mga produktong sumasaklaw sa maraming senaryo tulad ng siyentipikong pananaliksik at edukasyon, mga espesyal na operasyon, at mga serbisyong pangkomersyo.
Punto ng Sakit sa Ulo
- Mahabang siklo ng pag-unlad:Sa mga tradisyunal na solusyon, ang mga modyul tulad ng pagkontrol sa paggalaw, persepsyon sa kapaligiran, at pagpaplano ng desisyon ay ibinibigay ng iba't ibang supplier, at ang pag-debug ng integrasyon ay tumatagal ng hanggang 8-12 buwan.
- Kahirapan sa pakikipagtulungan ng sistema:Ang mga biped robot ay nangangailangan ng "cerebrum" (paggawa ng desisyon) at "cerebellum" (kontrol) upang makamit ang kolaborasyon sa antas ng millisecond, at ang tradisyonal na arkitektura ng paghihiwalay ay mahirap suportahan ang mahusay na interaksyon sa pagitan ng real-time na balanse at kamalayan sa multimodal.
- Mataas na gastos sa paglipat ng algorithm:Ang paglipat at pag-optimize ng mga algorithm mula sa simulation patungo sa totoong makina ay kadalasang nangangailangan ng paulit-ulit na pag-aangkop sa iba't ibang hardware interface, na nagpapabagal sa pangkalahatang pag-unlad.
02
Solusyon sa APQ
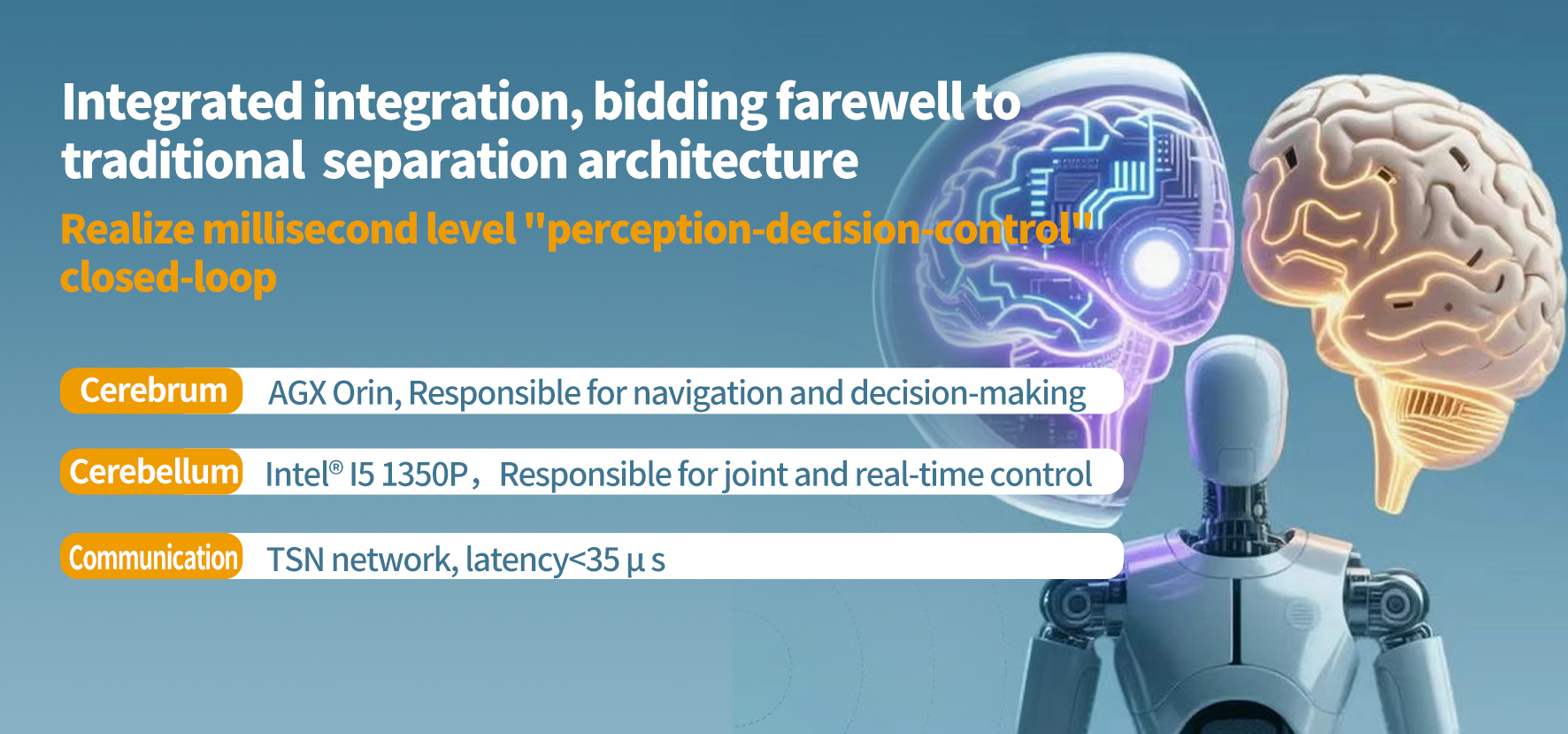
AGX Orin+Intel "utak at cerebellum"Kolaboratibong Arkitektura
1. Yugto ng disenyo ng iskema (Oktubre 2025)
Pag-aayos ng mga Kinakailangan:
Sama-samang suriin ang 13 pangunahing kinakailangan, kabilang ang real-time na gait control frequency na ≥ 1kHz, katumpakan ng multi-sensor synchronization na ≤ 40 μs, suporta para sa ROS 2 at custom middleware dual-mode, atbp.
Pagpapasadya ng scheme:
- Ang pangunahing control layer ay gumagamit ng AGX Orin+Intelutak at cerebellumfusion controller, na pinagsasama ang x86 high-performance decision unit at real-time control unit, na nakakamit ang integrasyon ng "perception-decision-control".
- I-deploy ang Intel I5 1350P bilang isang joint coprocessor sa execution layer, na responsable para sa servo control at local adaptive adjustment ng 28 joints.
- Ang komunikasyon ay batay sa Gigabit TSN (Time Sensitive Network), na tinitiyak na ang latency sa pagitan ng AGX Orin at x86 cerebellum ay mas mababa sa 35 μs.
2. Mabilis na yugto ng pag-deploy (Nobyembre-Disyembre 2025)
- Pagsaksak at paggamit ng hardware:Direktang umaangkop ang mga karaniwang electrical interface sa mga kasalukuyang servo drive at sensor ng mga customer, na binabawasan ang oras ng pag-customize ng cable.
- Software na handa nang gamitin agad:May paunang naka-install na Ubuntu 22.04 at ROS 2 systems, built-in na bipedal robot basic function package, maaaring makumpleto ng mga customer ang basic motion configuration sa loob ng 3 araw.
- Mahusay na collaborative debugging:Nagbibigay ang APQ ng suportang "on-site+remote" dual line upang mabilis na malutas ang mga problema tulad ng pagkakalibrate ng sensor, na lubos na nakakabawas sa oras ng pag-debug sa lugar.
03
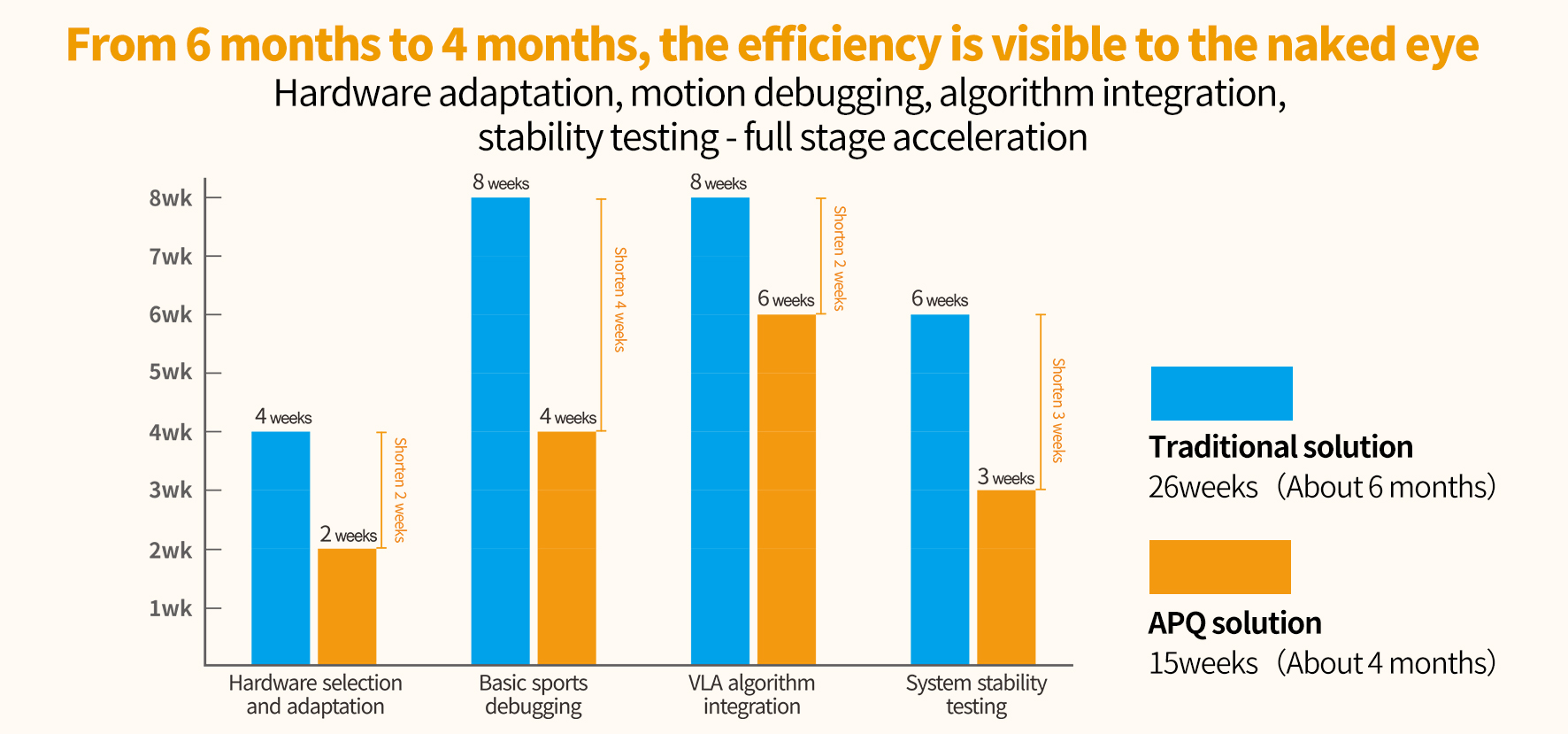
Pangunahing tagumpay: Pinaikli ng 40% ang siklo ng pag-unlad
Paghahambing ng mga Takdang Panahon ng Pag-unlad
Makabuluhang pagpapabuti ng pagganap
- Kontrol sa totoong oras:Ang siklo ng pagkontrol sa paglakad ay nadagdagan mula 5ms patungong 1ms, at ang bilis ng pagtugon sa dynamic balance ay nadagdagan ng 80%.
- Kahusayan sa pag-unlad:Pinahusay ang bilis ng pag-ulit ng algorithm, at maaaring makumpleto ng mga customer ang simulation real machine verification ng bagong gait sa loob ng 7 araw (ayon sa kaugalian, inaabot ito ng 20 araw).
- Katatagan ng sistema:Patuloy na 72 oras na pagsubok sa karga nang walang mga depekto, ang MTBF (Mean Time Between Failures) ay tumaas sa 1000 oras.
04
Feedback ng customer at mga pananaw sa industriya
Pagsusuri ng Direktor ng Teknikal na Kustomer
Mga APQutak at cerebellum'Tunay na nilulutas ng arkitektura ang mga problema sa pagbuo ng robot. Pinapayagan tayo ng AGX Orin na mabilis na magpatakbo ng mga kumplikadong algorithm ng nabigasyon, habang tinitiyak ng cerebellum ng Intel ang real-time na kontrol sa antas ng kasukasuan. Ang mga standardized na interface ay nagbibigay-daan sa atin na humiwalay sa pagbuo ng mababang antas ng driver at mas tumuon sa inobasyon ng algorithm sa itaas na antas.'
Mga Pananaw sa Industriya
1. Nagiging uso na ang pinagsamang disenyo:ang "utak" at "cerebellum" ay kailangang magtulungan nang malalim, at ang isang hiwalay na arkitektura ay naging isang hadlang sa kahusayan.
2. Lumilikha ng halaga ang estandardisasyon:Ang estandardisasyon ng mga hardware interface at software middleware ay maaaring makabuluhang bawasan ang pagiging kumplikado ng integrasyon.
3. Bagong modelo ng kolaborasyong ekolohikal:Ang mga supplier ay dapat maging "mga kasosyo sa solusyon" at lubos na lumahok sa maagang pag-unlad ng customer.
05
Mga pangunahing bentahe ng APQ Solution
Teknikal na Kalamangan
- Arkitekturang fusion: AGX Orin+Intelutak at cerebellummakamit ang pinag-isang paggawa ng desisyon at kontrol sa hardware, na iniiwasan ang mga bottleneck ng data bus.
- Elastic Expansion: Sinusuportahan ang iba't ibang configuration mula 12 joints hanggang 32 joints, at maaaring i-upgrade ang cerebellar performance sa I7 13700H.
- Bukas na ecosystem: ganap na tugma sa mga pangunahing kapaligiran sa pag-unlad tulad ng ROS 2, MATLAB/Simulink, atbp.
Mga Kalamangan sa Serbisyo
- Pagsasama sa buong siklo: pagbibigay ng magkasanib na serbisyo sa pag-unlad mula sa disenyo ng solusyon hanggang sa suporta sa malawakang produksyon.
- Pagbabahagi ng karanasan: Batay sa matagumpay na karanasan sa pag-unlad ng mahigit 50 kliyente ng robot, tinutulungan namin silang mabilis na umunlad.
- Mabilis na tugon: 7 × 24-oras na remote diagnosis + 48 oras na on-site na suporta upang matiyak ang maayos na implementasyon ng proyekto.

Sa mabilis na industriyalisasyon ng robotics ngayon, ang kahusayan sa pag-unlad ay naging susi sa kompetisyon. Sa pamamagitan ng collaborative architecture ng "utak at cerebellum"at malalalim na serbisyo, ang APQ ay hindi lamang nakakatulong sa mga customer na makamit ang 40% na pagbawas sa mga siklo ng pag-unlad, kundi pinatutunayan din ang mahalagang halaga ng pinagsamang disenyo sa mga kumplikadong sistema ng robot. Inaasahan namin ang pakikipagtulungan sa mas maraming kasosyo upang sama-samang isulong ang pagdating ng panahon ng embodied intelligence."
Kung interesado ka sa aming kumpanya at mga produkto, huwag mag-atubiling makipag-ugnayan sa aming kinatawan sa ibang bansa, si Robin.
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
Oras ng pag-post: Enero-09-2026