
در پس زمینه موج جهانی هوش تجسم یافته، عملکرد کنترلکنندگان ربات به یک عامل تعیینکننده کلیدی در سطح هوش آنها تبدیل شده است.سری KiWiBot از کنترلرهای ربات هوشمند تجسمی از APQارائه دهنده راهکارهای پیشگامانه برای کنترل حرکت با دقت بالا از طریق نوآوریطراحی داخلی و معماری کنترل مشارکتی «مغز بزرگ-مغز کوچک».

۰۱.
تکرار فناوری: پیشرفتهای دوگانه در حجم و عملکرد
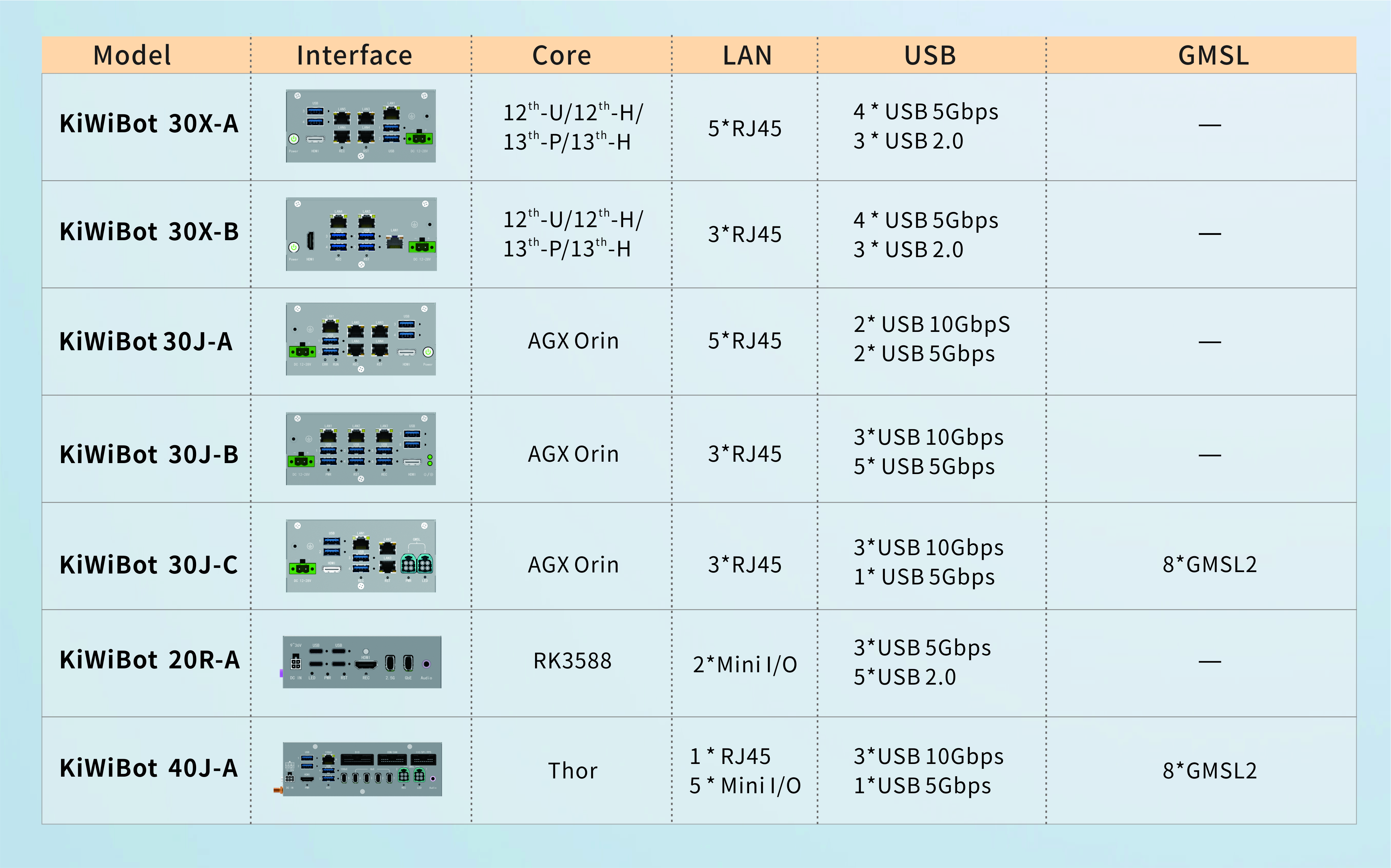
رباتهای مجسم الزامات سختگیرانهای را بر کنترلکنندهها تحمیل میکنند، از جملهاندازه جمع و جور، عملکرد بالا، یکپارچه سازی بالا، پایداری بالا، قابلیت زمان واقعی بالا و نویز کمسری کنترلرهای APQ KiWiBot، طی سه نسل تکامل فناوری، به تدریج نقاط ضعف کنترلرهای سنتی را برطرف کردهاند:
کنترلکننده نسل دومبر اساس معماری X86+Orin ساخته شده و مزایایی مانند موارد زیر را ارائه میدهد:مدلهای متنوع، انتخاب انعطافپذیر، مقیاسپذیری قوی و اندازه جمعوجور.
کنترلکننده نسل سومعملکرد کلی را با استفاده از کانکتورها بهینه میکند.راه حل مهار سیم کشی خودرو، به طور قابل توجهی قابلیت اطمینان را افزایش میدهد.

مدل پیشنهادی کنترلر «مخچه و مغز مرکزی»
۰۲.
چهار حالت نصب: انعطافپذیر برای سازگاری با سناریوهای مختلف
این کنترلر چهار روش نصب ارائه میدهد تا سازگاری بهینه را در سناریوهای مختلف کاربردی تضمین کند.
●نصب پوستهایافزایش استحکام سازه و مقاومت در برابر ضربه، بهبود عملکرد حفاظت از محیط زیست
●نصب بدون پوستهابعاد ایدهآل به اندازه کف دست، سیستم خنککننده سهگانه، عملکرد بیصدا و پایدار را تضمین میکند
●نصب کنار همساختار مستحکم، نگهداری آسان
●نصب روی هم چیده شده: بسیار یکپارچه، کمجا، مناسب برای سناریوهای با محدودیت فضا
کل این سری از طراحی صنعتی بهره میبرد که شامل سازگاری عالی با محیط زیست و مقیاسپذیری انعطافپذیر است.

۰۳.
مزیت اصلی: توانمندسازی کنترل دقیق حرکت
مزایای اصلی این کنترلر در استثنایی بودن آن نهفته است.زمان واقعیعملکرد و دقتهماهنگسازی زمانقابلیتهایی که پشتیبانی حیاتی برای کنترل حرکت با دقت بالا ارائه میدهند. چه دررباتیک سیار، اتوماسیون صنعتی یا کاربردهای تخصصی، عملکرد عملیاتی پایدار و قابل اعتماد را تضمین میکند.
از استحکام بالایی برخوردار استسازگاری الکترومغناطیسی (EMC)وقابلیتهای ضد تداخل، همراه با مقاومت عالی در برابر ارتعاش، عملکرد پایدار در محیطهای الکترومغناطیسی پیچیده را تضمین میکند. طراحی ماژولار، عملکرد مستقل هر جزء را امکانپذیر میکند و به طور قابل توجهی قابلیت اطمینان و نگهداری سیستم را افزایش میدهد.

همزمان با پیشرفت صنعت رباتیک به سمت دقت بالاتر و انعطافپذیری بیشتر، معماری کنترل حرکت نیز در حال تحول قابل توجهی از پردازش متمرکز به همکاری توزیعشده است. کنترلر APQ KiWiBot، از طریق طراحی داخلی و معماری نوآورانه مشارکتی "مغز بزرگ و کوچک"، نه تنها چالشهای کنترل با دقت بالا را برطرف میکند، بلکه یک پایه فنی خوداتکا و قابل کنترل را برای صنعت فراهم میکند و مسیر فناوری جدیدی را برای چین در رقابت جهانی هوش تجسمی هموار میکند.
زمان ارسال: ۱۴ نوامبر ۲۰۲۵