![[Senagat mysaly] Iki aýakly gumanoid robot işläp düzmek sikli 40% gysgaldyldy! Öňdebaryjy integratorlar APQ-nyň](/style/global/img/img_45.jpg)
2025-nji ýylyň oktýabr aýyndan 2026-njy ýylyň ýanwar aýyna çenli öňdebaryjy ýerli gumanoid robot integratory APQ bilen ýakyndan hyzmatdaşlyk etdi. AGX Orin + Intel "beýni we beýni" bilelikdäki arhitekturasyna esaslanyp, olar täze nesil iki aýakly gumanoid robot prototipiniň işlenip düzülmegini we sazlanmagyny tamamladylar.bary-ýogy dört aý, umumy ösüş siklini däp bolan usullar bilen deňeşdirilende 40% azaldýar.
01
Müşderi geçmişi we esasy kynçylyklar
Müşderi profili
Iki aýakly gumanoid robotlary öwrenmekde we integrasiýa etmekde öňdebaryjy ýerli kärhana, ýokary derejeli bionik robotlar ulgamyna ünsi jemläp, ylmy barlaglar we bilim, ýörite operasiýalar we täjirçilik hyzmatlary ýaly dürli ugurlary öz içine alýan önümleri bilen üpjün edýär.
Esasy agyry nokady
- Uzak ösüş sikli:Adaty çözgütlerde hereketi dolandyrmak, daşky gurşawy duýmak we kararlary meýilleşdirmek ýaly modullar dürli üpjün edijiler tarapyndan hödürlenýär we integrasiýa sazlamalaryny düzetmek 8-12 aýa çenli wagt alýar.
- Sistema hyzmatdaşlygyndaky kynçylyk:Iki aýakly robotlara millisekunt derejesindäki hyzmatdaşlygy gazanmak üçin "beýni" (karar kabul etmek) we "beýnijik" (dolandyryş) gerek, däp bolan bölmek arhitekturasy bolsa real wagt deňagramlylygy bilen köpmodal habardarlygyň arasyndaky netijeli özara täsiri goldamak kyn.
- Algoritm göçürilişiniň ýokary bahasy:Algoritmleriň simulýasiýadan hakyky maşyna geçirilmegi we optimizirlenmegi köplenç dürli apparat interfeýslerine gaýtalanýan uýgunlaşmany talap edýär, bu bolsa umumy ösüşi haýalladýar.
02
APQ çözgüdi
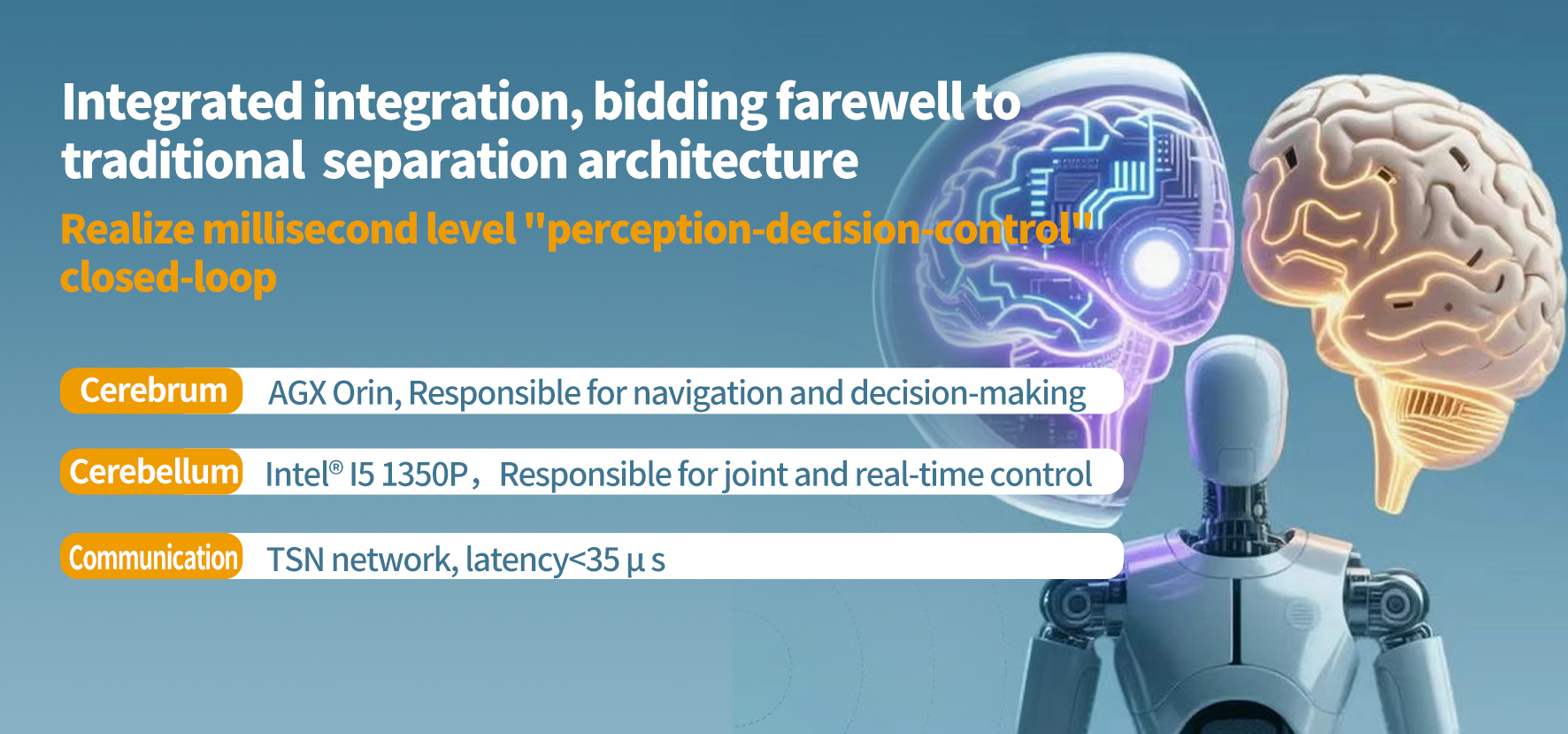
AGX Orin+Intel "beýni we beýni"Bilelikdäki arhitektura
1. Meýilnamanyň dizaýn tapgyry (2025-nji ýylyň oktýabr aýy)
Talaplaryň deňleşdirilmegi:
13 esasy talaplary bilelikde gözden geçiriň, şol sanda real wagt režiminde ýöreýişiň dolandyryş ýygylygy ≥ 1kHz, köp sensorly sinhronizasiýa takyklygy ≤ 40 μ s, ROS 2-ni goldamak we ýörite ara programma üpjünçiliginiň iki režimliligi we ş.m.
Şemany özleşdirmek:
- Esasy dolandyryş gatlagy AGX Orin+Intel-i kabul edýärbeýni we beýni"duýgular-karar-gözegçilik" integrasiýasyny amala aşyrýan, x86 ýokary öndürijilikli karar birligini we real wagt dolandyryş birligini birleşdirýän füziýa kontrolleri.
- Intel I5 1350P-ni ýerine ýetiriş gatlagynda bilelikdäki koprosessor hökmünde ornaşdyryň, ol serwo dolandyryş we 28 bogunyň ýerli adaptiw sazlanyşy üçin jogapkärdir.
- Aragatnaşyk Gigabit TSN (Wagta Duýgur Tor) esasynda amala aşyrylýar we AGX Orin bilen x86 beýniniň arasyndaky gijikmäniň 35 μs-den az bolmagyny üpjün edýär.
2. Çalt ýerleşdiriş tapgyry (2025-nji ýylyň noýabr-dekabr aýlary)
- Enjamlary birikdir we işlet:Standart elektrik interfeýsleri müşderileriň bar bolan serwo sürüjilerine we datçiklerine gönüden-göni uýgunlaşýar, bu bolsa kabeliň özleşdirilme wagtyny azaldýar.
- Gutudan çykaryp ulanmaga taýýar programma üpjünçiligi:Öňünden gurnalan Ubuntu 22.04 we ROS 2 ulgamlary, iki aýakly robotyň esasy funksiýa toplumy, müşderiler esasy hereket konfigurasiýasyny 3 günüň içinde tamamlap bilerler.
- Netijeli bilelikdäki sazlamalar:APQ sensory kalibrlemek ýaly meseleleri çalt çözmek üçin "ýerinde + uzakdan" iki liniýa goldawyny üpjün edýär we ýerinde sazlamak wagtyny ep-esli azaldýar.
03
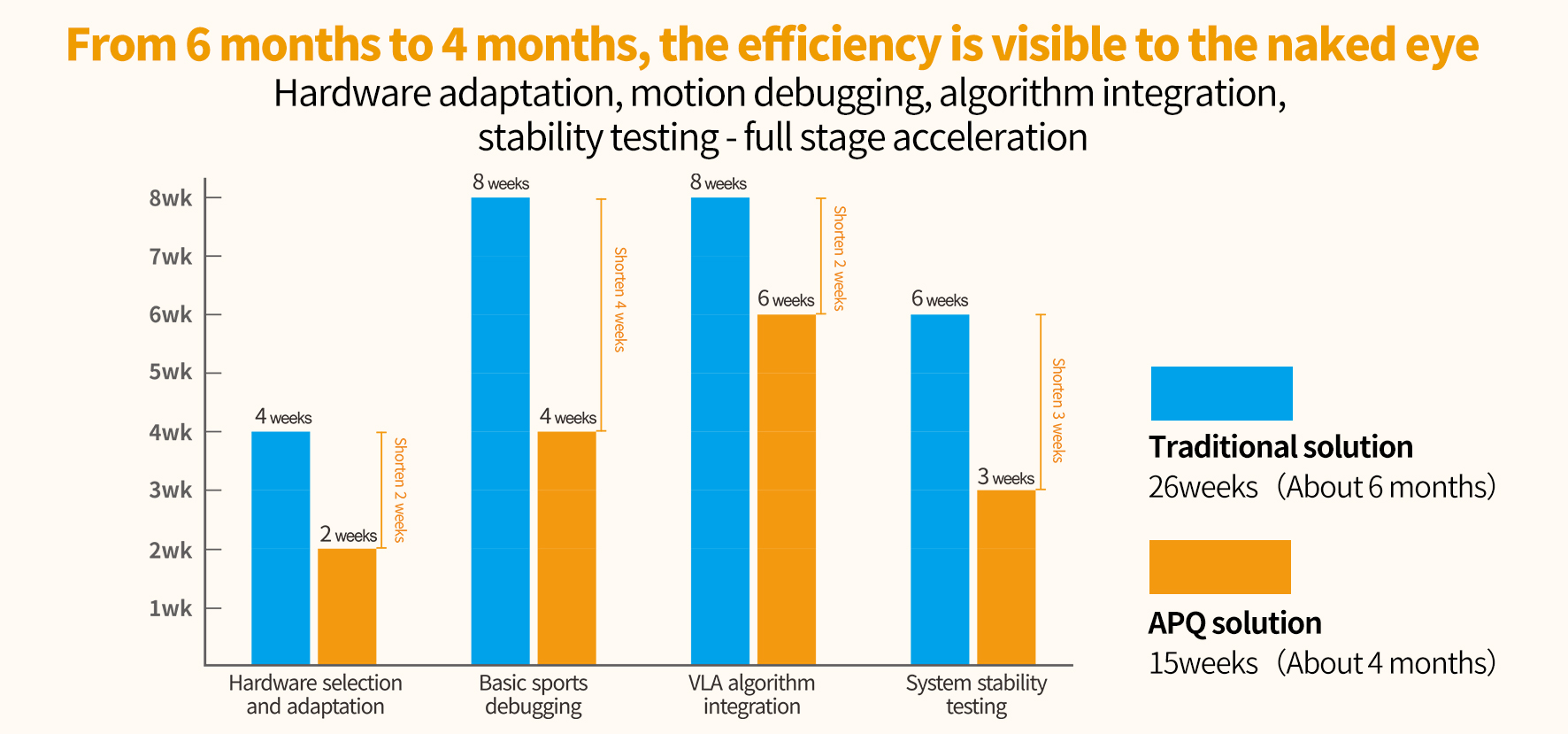
Esasy üstünlik: Ösüş sikli 40% gysgaldy
Ösüş möhletleriniň deňeşdirilmegi
Işjeňligiň ep-esli ýokarlanmagy
- Real wagt dolandyryşy:Ýöreýän hereketi dolandyrmak sikli 5ms-den 1ms-e çenli artdyryldy we dinamiki deňagramlylyk jogabynyň tizligi 80% ýokarlandyryldy.
- Ösüşiň netijeliligi:Algoritmiň iterasiýa tizligi gowulandyryldy we müşderiler täze ýöreýşiň hakyky maşyn barlagyny 7 günüň içinde (adatça 20 gün gerek) simulýasiýa edip bilerler.
- Sistemanyň durnuklylygy:72 sagatlyk üznüksiz ýük synagy, hiç hili näsazlyk bolmazdan, MTBF (näsazlyklar arasyndaky ortaça wagt) 1000 sagada çenli artdyryldy.
04
Müşderi pikirleri we pudak maglumatlary
Müşderi tehniki direktorynyň bahalandyrmasy
APQ-larbeýni we beýni"Arhitektura robot işläp düzmegiň kynçylyklaryny hakykatdanam çözýär. AGX Orin bize çylşyrymly nawigasiýa algoritmlerini çalt işletmäge mümkinçilik berýär, Inteliň kiçi beýni bolsa real wagt režiminde birleşme derejesiniň dolandyrylmagyny üpjün edýär. Standartlaşdyrylan interfeýsler bize pes derejeli sürüji işläp düzmelerinden daşlaşmaga we ýokary derejeli algoritm innowasiýasyna has köp üns bermäge mümkinçilik berýär."
Senagat maglumatlary
1. Integrasiýalaşdyrylan dizaýn bir tendensiýa öwrülýär:"beýni" we "beýniniň" çuňňur hyzmatdaşlyk etmegi zerurdyr we aýratyn arhitektura netijeliligiň päsgelçilik döretmegine sebäp boldy.
2. Standartlaşdyrmak gymmatlyk döredýär:Apparat interfeýsleriniň we programma üpjünçiliginiň aralyk programma üpjünçiliginiň standartlaşdyrylmagy integrasiýanyň çylşyrymlylygyny ep-esli azaldyp biler.
3. Ekologiýa hyzmatdaşlygyň täze modeli:Üpjün edijiler "çözgüt hyzmatdaşlaryna" öwrülmeli we müşderileriň irki ösüşine çuňňur gatnaşmalydyrlar.
05
APQ çözgüdiniň esasy artykmaçlyklary
Tehniki artykmaçlyk
- Füzýon arhitekturasy: AGX Orin+Intelbeýni we beýnimaglumat awtobusyndaky päsgelçilikleriň öňüni alyp, enjamlaryň birleşdirilen karar kabul etmegine we gözegçiligine ýetmek.
- Elastik giňelme: 12 bogundan 32 boguna çenli dürli konfigurasiýalary goldaýar we kiçijik beýniniň işini I7 13700H derejesine çenli ýokarlandyryp bolýar.
- Açyk ekosistema: ROS 2, MATLAB/Simulink ýaly esasy ösüş gurşawlary bilen doly utgaşykly.
Hyzmatyň artykmaçlyklary
- Doly siklli ýoldaşlyk: çözgüt dizaýnyndan köpçülikleýin önümçiligi goldamaga çenli bilelikdäki işläp düzmek hyzmatlaryny bermek.
- Tejribe paýlaşmak: 50-den gowrak robot müşderisiniň üstünlikli ösüş tejribesine esaslanyp, biz olara çalt öňe gitmäge kömek edýäris.
- Çalt jogap: Taslamanyň bökdençsiz ýerine ýetirilmegini üpjün etmek üçin 7 × 24 sagat uzakdan diagnoz + ýerinde 48 sagat goldaw.

Robotehnikanyň häzirki wagtda çaltlaşýan senagatlaşmagynda ösüşiň netijeliligi bäsdeşligiň açaryna öwrüldi. "" hyzmatdaşlyk arhitekturasy arkalybeýni we beýni"we çuňňur hyzmatlar bilen, APQ müşderilere diňe bir ösüş sikllerini 40% azaltmaga kömek etmän, eýsem çylşyrymly robot ulgamlarynda integrasiýalaşdyrylan dizaýnyň möhüm gymmatyny hem barlaýar. Biz zehni taýdan kemala gelen intellekt döwrüniň gelmegini bilelikde öňe sürmek üçin has köp hyzmatdaşlar bilen işleşmäge sabyrsyzlyk bilen garaşýarys."
Eger siz biziň kompaniýamyz we önümlerimiz bilen gyzyklanýan bolsaňyz, daşary ýurtdaky wekilimiz Robin bilen habarlaşyp bilersiňiz.
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
Ýerleşdirilen wagty: 2026-njy ýylyň 9-njy ýanwary