![[Ka Endistri] Sik Devlopman Robo Bipèd Imanoid la Vin Pi Kout De 40%! Kijan Entegratè Lidè yo Reyalize Avansman Rapid ak Solisyon](/style/global/img/img_45.jpg)
Soti Oktòb 2025 rive Janvye 2026, yon entegratè robo umanoid domestik dirijan te kolabore kole kole ak APQ. Baze sou achitekti kolaboratif AGX Orin + Intel "sèvo ak serebel" la, yo te konplete devlopman ak debogaj yon nouvo jenerasyon pwototip robo umanoid bipèd nan...jis kat mwa, sa ki diminye sik devlopman jeneral la pa 40% konpare ak metòd tradisyonèl yo.
01
Istorik kliyan ak defi prensipal yo
Pwofil Kliyan
Yon antrepriz domestik dirijan nan rechèch ak entegrasyon robo umanoid bipèd, ki konsantre sou domèn robo byonik wo nivo, ak pwodwi ki kouvri plizyè senaryo tankou rechèch syantifik ak edikasyon, operasyon espesyal, ak sèvis komèsyal yo.
Pwen Doulè Santral
- Sik devlopman long:Nan solisyon tradisyonèl yo, modil tankou kontwòl mouvman, pèsepsyon anviwònman, ak planifikasyon desizyon yo bay pa diferan founisè, epi debogaj entegrasyon an pran jiska 8-12 mwa.
- Difikilte nan kolaborasyon sistèm:Robo bipèd bezwen "sèvo" (pran desizyon) ak "serebelo" (kontwòl) pou reyalize kolaborasyon nivo milisegond, epi achitekti separasyon tradisyonèl la difisil pou sipòte entèraksyon efikas ant balans an tan reyèl ak konsyans multimodal.
- Pri migrasyon algoritm ki wo:Migrasyon ak optimize algoritm yo soti nan simulation rive nan machin reyèl souvan mande pou plizyè adaptasyon ak diferan koòdone pyès ki nan konpitè, sa ki ralanti pwogrè jeneral la.
02
Solisyon APQ
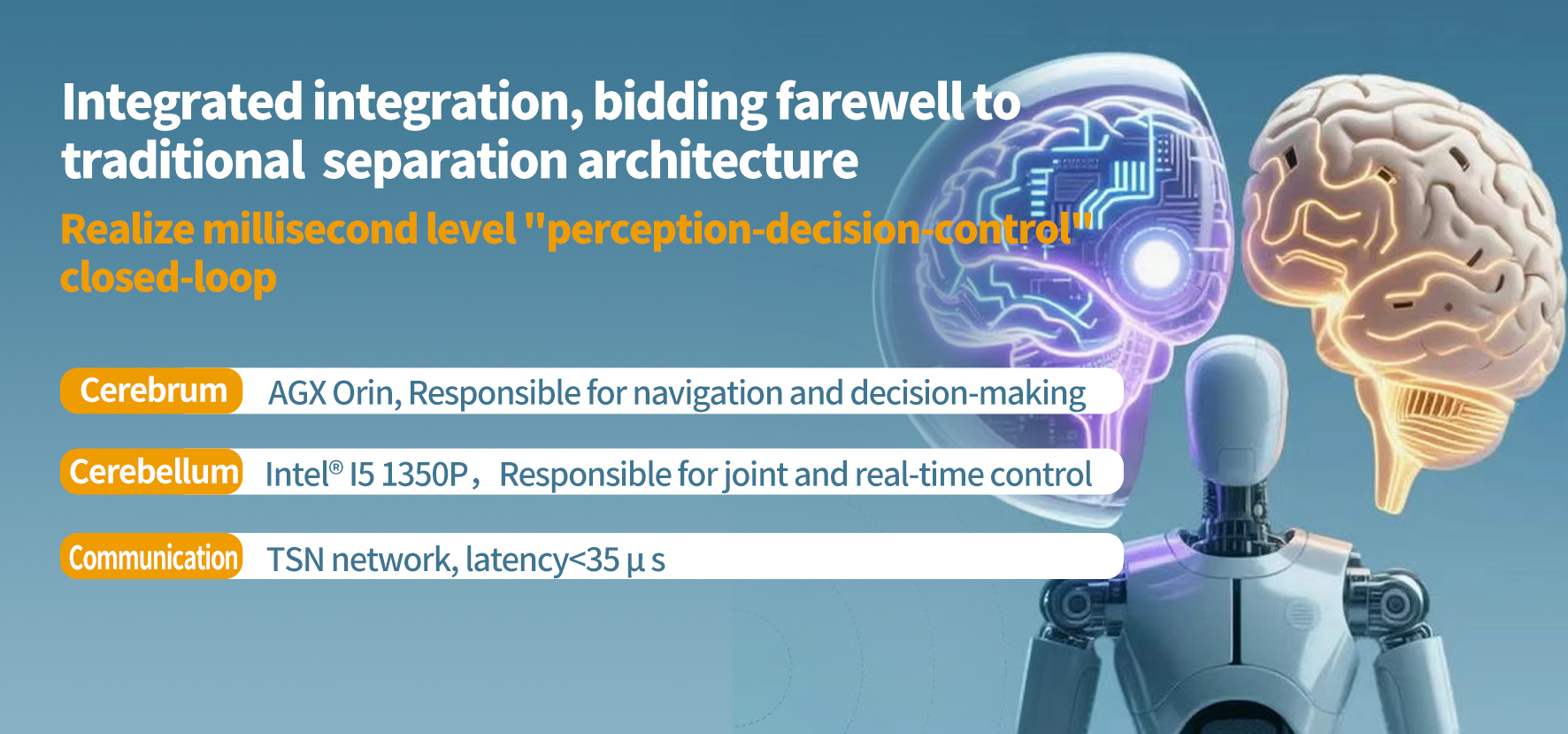
AGX Orin+Intelsèvo ak serebelòm"Achitekti Kolaboratif
1. Faz konsepsyon pwojè a (Oktòb 2025)
Aliyman egzijans:
Revize ansanm 13 egzijans debaz, tankou frekans kontwòl mach an tan reyèl ≥ 1kHz, presizyon senkronizasyon milti-capteur ≤ 40 μs, sipò pou ROS 2 ak doub-mòd middleware koutim, elatriye.
Pèsonalizasyon plan:
- Kouch kontwòl prensipal la adopte AGX Orin + Intelsèvo ak serebelòmkontwolè fizyon, entegre inite desizyon pèfòmans segondè x86 ak inite kontwòl an tan reyèl, reyalize entegrasyon "pèsepsyon-desizyon-kontwòl".
- Deplwaye Intel I5 1350P kòm yon koprosesè jwenti nan kouch ekzekisyon an, responsab pou kontwòl servo ak ajisteman adaptatif lokal 28 jwenti yo.
- Kominikasyon an baze sou Gigabit TSN (Time Sensitive Network), sa ki asire ke latans ant AGX Orin ak serebelo x86 la mwens pase 35 μs.
2. Faz deplwaman rapid (Novanm-Desanm 2025)
- Materyèl branche epi jwe:Entèfas elektrik estanda yo adapte dirèkteman ak servo drive ak detèktè kliyan yo ki deja egziste, sa ki diminye tan personnalisation kab la.
- Lojisyèl pare pou itilize depi nan bwat la:Sistèm Ubuntu 22.04 ak ROS 2 pre-enstale, pake fonksyon debaz robo bipèd entegre, kliyan yo ka konplete konfigirasyon mouvman debaz la nan 3 jou.
- Debogaj kolaboratif efikas:APQ bay sipò doub liy "sou plas + a distans" pou rezoud pwoblèm rapidman tankou kalibrasyon detèktè, sa ki diminye anpil tan debogaj sou plas.
03
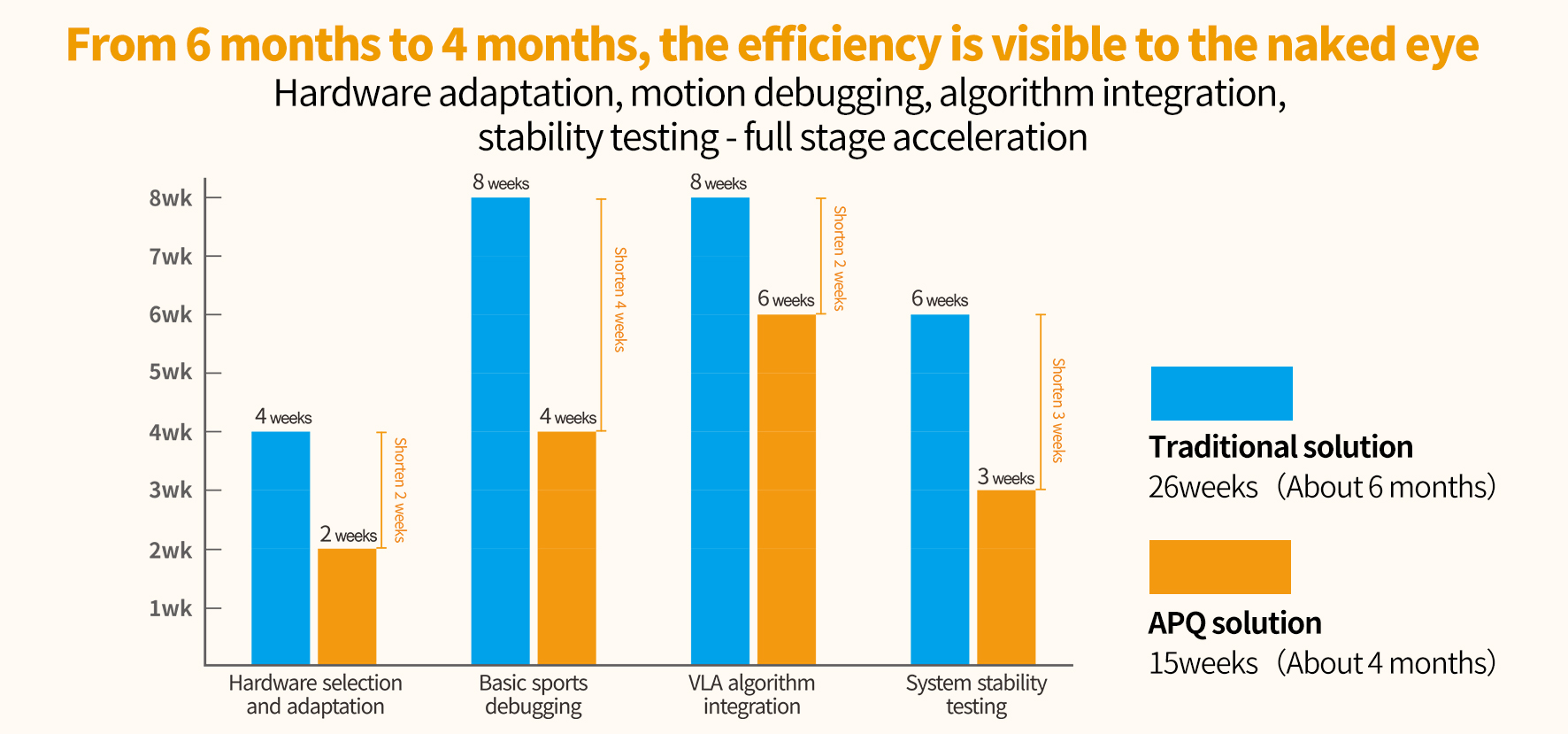
Reyalizasyon enpòtan: Sik devlopman an vin pi kout pa 40%
Konparezon Delè Devlopman yo
Amelyorasyon pèfòmans siyifikatif
- Kontwòl an tan reyèl:Sik kontwòl mach la ogmante soti nan 5ms pou rive nan 1ms, epi vitès repons balans dinamik la ogmante pa 80%.
- Efikasite devlopman:Yo amelyore vitès iterasyon algoritm lan, epi kliyan yo ka konplete verifikasyon machin reyèl similasyon an sou nouvo mach la nan 7 jou (tradisyonèlman li pran 20 jou).
- Estabilite sistèm:Tès chaj kontinyèl 72 èdtan san okenn defo, MTBF (Tan Mwayèn Ant Defo) ogmante a 1000 èdtan.
04
Kòmantè kliyan ak enfòmasyon sou endistri a
Evalyasyon Direktè Teknik Kliyan
APQ yosèvo ak serebelòmAchitekti a vrèman rezoud pwoblèm devlopman robo yo. AGX Orin pèmèt nou byen vit egzekite algoritm navigasyon konplèks, pandan ke serebelo Intel la asire kontwòl nivo jwenti an tan reyèl. Entèfas estanda yo pèmèt nou kraze ak devlopman chofè ki ba nivo epi konsantre plis sou inovasyon algoritm ki pi wo nivo.
Apèsi sou endistri a
1. Konsepsyon entegre ap vin yon tandans:la "sèvo"ak" serebelo a" bezwen kolabore pwofondman, e yon achitekti separe vin tounen yon blokaj nan efikasite.
2. Normalizasyon kreye valè:Normalizasyon koòdone pyès ki nan konpitè ak middleware lojisyèl ka diminye konpleksite entegrasyon an anpil.
3. Nouvo modèl kolaborasyon ekolojik:Founisè yo ta dwe transfòme an "patnè solisyon" epi patisipe pwofondman nan devlopman kliyan byen bonè.
05
Avantaj prensipal Solisyon APQ a
Avantaj teknik
- Achitekti fizyon: AGX Orin+Intelsèvo ak serebelòmreyalize yon pwosesis pran desizyon ak kontwòl inifye sou pyès ki nan konpitè, pou evite blokaj nan bis done yo.
- Ekspansyon elastik: Sipòte diferan konfigirasyon soti nan 12 jwenti rive nan 32 jwenti, epi pèfòmans serebeleuz la ka amelyore rive nan I7 13700H.
- Ekosistem ouvè: totalman konpatib ak anviwònman devlopman endikap tankou ROS 2, MATLAB/Simulink, elatriye.
Avantaj Sèvis yo
- Konpayi sik konplè: bay sèvis devlopman konjwen, depi konsepsyon solisyon rive nan sipò pou pwodiksyon an mas.
- Pataj eksperyans: Baze sou eksperyans devlopman siksè plis pase 50 kliyan robo, nou ede yo avanse rapidman.
- Repons rapid: 7 × dyagnostik a distans 24 sou 24 + sipò sou plas 48 sou 48 pou asire bon aplikasyon pwojè a.

Nan endistriyalizasyon robotik k ap akselere jodi a, efikasite devlopman an vin tounen kle konpetisyon an. Atravè achitekti kolaboratif "sèvo ak serebelòm"ak sèvis pwofon, APQ pa sèlman ede kliyan yo reyalize yon rediksyon 40% nan sik devlopman yo, men tou li verifye valè enpòtan konsepsyon entegre nan sistèm robo konplèks yo. Nou anvi travay avèk plis patnè pou ankouraje ansanm rive epòk entèlijans enkòpore a."
Si w enterese nan konpayi nou an ak pwodwi nou yo, ou lib pou kontakte reprezantan nou lòt bò dlo a, Robin.
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
Dat piblikasyon: 9 janvye 2026