![[กรณีศึกษาจากอุตสาหกรรม] วงจรการพัฒนาหุ่นยนต์ฮิวมานอยด์สองขา สั้นลงถึง 40%! บริษัทผู้รวมระบบชั้นนำประสบความสำเร็จในการพัฒนาอย่างรวดเร็วด้วยโซลูชัน “สมองส่วนซีรีบรัมและซีรีเบลลัม” ของ APQ ได้อย่างไร](/style/global/img/img_45.jpg)
ระหว่างเดือนตุลาคม 2568 ถึงมกราคม 2569 บริษัทผู้รวมระบบหุ่นยนต์ฮิวมานอยด์ชั้นนำในประเทศได้ร่วมมืออย่างใกล้ชิดกับ APQ โดยใช้สถาปัตยกรรมความร่วมมือ AGX Orin + Intel "สมองส่วนซีรีบรัมและซีรีเบลลัม" ในการพัฒนาและแก้ไขข้อบกพร่องของหุ่นยนต์ฮิวมานอยด์สองขาต้นแบบรุ่นใหม่จนแล้วเสร็จภายในระยะเวลาอันสั้นใช้เวลาเพียงสี่เดือน ลดระยะเวลาการพัฒนาโดยรวมลง 40% เมื่อเทียบกับวิธีการแบบดั้งเดิม.
01
ข้อมูลพื้นฐานของลูกค้าและความท้าทายหลัก
ข้อมูลลูกค้า
บริษัทชั้นนำในประเทศด้านการวิจัยและบูรณาการหุ่นยนต์ฮิวมานอยด์สองขา โดยมุ่งเน้นในด้านหุ่นยนต์ไบโอนิกส์ระดับสูง ผลิตภัณฑ์ครอบคลุมหลากหลายสถานการณ์ เช่น การวิจัยทางวิทยาศาสตร์และการศึกษา การปฏิบัติการพิเศษ และบริการเชิงพาณิชย์
จุดอ่อนหลัก
- วงจรการพัฒนาที่ยาวนาน:ในโซลูชันแบบดั้งเดิม โมดูลต่างๆ เช่น การควบคุมการเคลื่อนไหว การรับรู้สภาพแวดล้อม และการวางแผนการตัดสินใจ จะมาจากผู้จำหน่ายที่แตกต่างกัน และการแก้ไขข้อผิดพลาดในการบูรณาการอาจใช้เวลานานถึง 8-12 เดือน
- ความยากลำบากในการทำงานร่วมกันของระบบ:หุ่นยนต์สองขาจำเป็นต้องมี "สมองใหญ่" (สำหรับการตัดสินใจ) และ "สมองน้อย" (สำหรับการควบคุม) เพื่อให้สามารถทำงานร่วมกันได้ในระดับมิลลิวินาที และสถาปัตยกรรมแบบแยกส่วนแบบดั้งเดิมนั้นยากที่จะรองรับการโต้ตอบที่มีประสิทธิภาพระหว่างการทรงตัวแบบเรียลไทม์และการรับรู้แบบหลายรูปแบบ
- ค่าใช้จ่ายในการเปลี่ยนอัลกอริทึมสูง:การย้ายและการปรับปรุงประสิทธิภาพของอัลกอริธึมจากระบบจำลองไปสู่เครื่องจริง มักต้องมีการปรับเปลี่ยนซ้ำๆ ให้เข้ากับอินเทอร์เฟซฮาร์ดแวร์ที่แตกต่างกัน ซึ่งทำให้กระบวนการโดยรวมช้าลง
02
โซลูชัน APQ
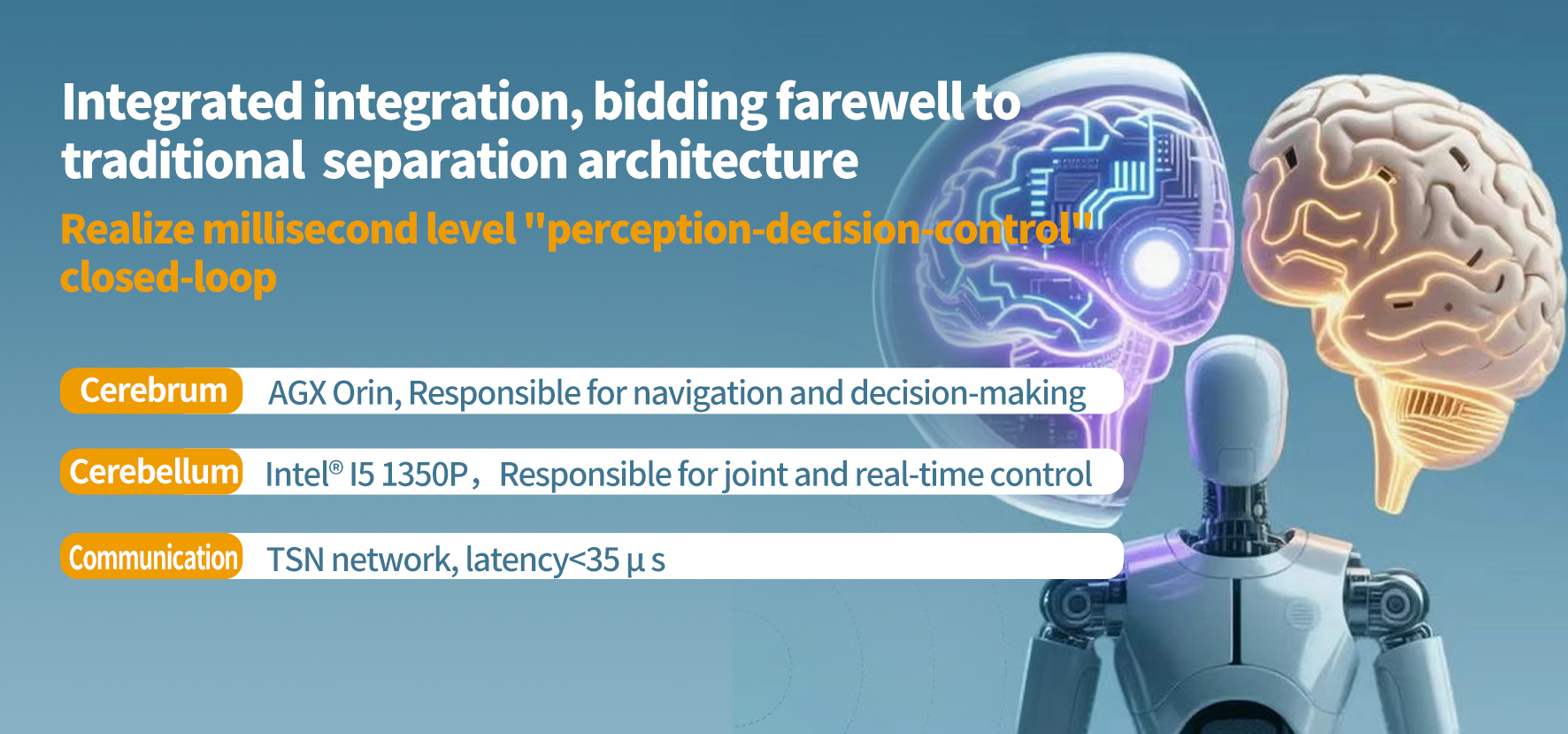
AGX Orin+Intel "สมองใหญ่และสมองน้อยสถาปัตยกรรมแบบร่วมมือ
1. ขั้นตอนการออกแบบโครงการ (ตุลาคม 2568)
การจัดเรียงข้อกำหนด:
ร่วมกันทบทวนข้อกำหนดหลัก 13 ข้อ รวมถึงความถี่ในการควบคุมการเดินแบบเรียลไทม์ ≥ 1kHz ความแม่นยำในการซิงโครไนซ์เซ็นเซอร์หลายตัว ≤ 40 μs การสนับสนุน ROS 2 และมิดเดิลแวร์แบบกำหนดเองในโหมดคู่ เป็นต้น
การปรับแต่งรูปแบบ:
- ชั้นควบคุมหลักใช้ AGX Orin+Intelสมองใหญ่และสมองน้อยตัวควบคุมฟิวชั่น ซึ่งผสานรวมหน่วยตัดสินใจประสิทธิภาพสูง x86 และหน่วยควบคุมแบบเรียลไทม์ ทำให้เกิดการบูรณาการ "การรับรู้-การตัดสินใจ-การควบคุม"
- ติดตั้ง Intel I5 1350P เป็นโคโปรเซสเซอร์ร่วมในเลเยอร์การประมวลผล ทำหน้าที่ควบคุมเซอร์โวและการปรับแต่งเฉพาะที่ของข้อต่อทั้ง 28 ข้อ
- การสื่อสารนี้ใช้เทคโนโลยี Gigabit TSN (Time Sensitive Network) ซึ่งทำให้มั่นใจได้ว่าความหน่วงระหว่าง AGX Orin และหน่วยประมวลผล x86 จะน้อยกว่า 35 ไมโครวินาที
2. ระยะการใช้งานอย่างรวดเร็ว (พฤศจิกายน-ธันวาคม 2568)
- ฮาร์ดแวร์แบบเสียบแล้วใช้งานได้ทันที:อินเทอร์เฟซไฟฟ้ามาตรฐานสามารถปรับให้เข้ากับเซอร์โวไดรฟ์และเซ็นเซอร์ที่มีอยู่ของลูกค้าได้โดยตรง ช่วยลดเวลาในการปรับแต่งสายเคเบิล
- ซอฟต์แวร์พร้อมใช้งานได้ทันที:มาพร้อมระบบ Ubuntu 22.04 และ ROS 2 ที่ติดตั้งไว้ล่วงหน้า และแพ็คเกจฟังก์ชันพื้นฐานของหุ่นยนต์สองขา ลูกค้าสามารถตั้งค่าการเคลื่อนไหวพื้นฐานได้ภายใน 3 วัน
- การแก้ไขข้อผิดพลาดร่วมกันอย่างมีประสิทธิภาพ:APQ ให้บริการสนับสนุนแบบสองทาง "ทั้งในสถานที่และทางไกล" เพื่อแก้ไขปัญหาต่างๆ เช่น การปรับเทียบเซ็นเซอร์ได้อย่างรวดเร็ว ช่วยลดเวลาในการแก้ไขข้อผิดพลาดในสถานที่ได้อย่างมาก
03
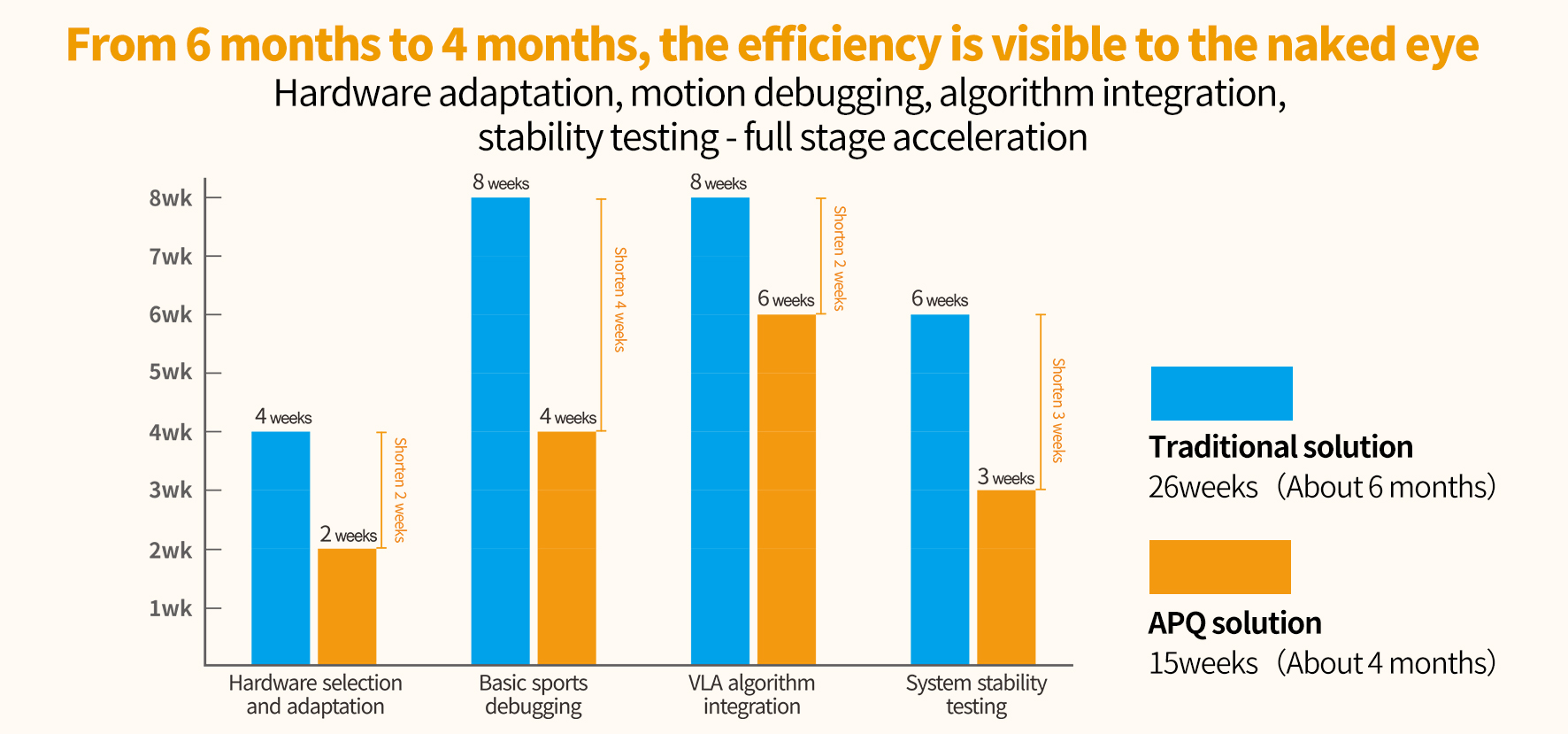
ความสำเร็จที่สำคัญ: ระยะเวลาการพัฒนาสั้นลง 40%
การเปรียบเทียบระยะเวลาการพัฒนา
การปรับปรุงประสิทธิภาพอย่างมีนัยสำคัญ
- การควบคุมแบบเรียลไทม์:รอบการควบคุมการเดินเพิ่มขึ้นจาก 5 มิลลิวินาที เป็น 1 มิลลิวินาที และความเร็วในการตอบสนองการทรงตัวแบบไดนามิกเพิ่มขึ้น 80%
- ประสิทธิภาพในการพัฒนา:ความเร็วในการประมวลผลของอัลกอริทึมได้รับการปรับปรุงให้ดีขึ้น และลูกค้าสามารถทำการตรวจสอบความถูกต้องของการเดินแบบใหม่บนเครื่องจริงได้ภายใน 7 วัน (โดยปกติจะใช้เวลา 20 วัน)
- ความเสถียรของระบบ:ผ่านการทดสอบการรับน้ำหนักต่อเนื่อง 72 ชั่วโมงโดยไม่มีข้อผิดพลาดใดๆ ค่า MTBF (เวลาเฉลี่ยระหว่างความล้มเหลว) เพิ่มขึ้นเป็น 1000 ชั่วโมง
04
ความคิดเห็นของลูกค้าและข้อมูลเชิงลึกของอุตสาหกรรม
การประเมินโดยผู้อำนวยการฝ่ายเทคนิคลูกค้า
APQs'สมองใหญ่และสมองน้อย“สถาปัตยกรรมนี้ช่วยแก้ปัญหาที่สำคัญในการพัฒนาหุ่นยนต์ได้อย่างแท้จริง AGX Orin ช่วยให้เราสามารถเรียกใช้อัลกอริทึมการนำทางที่ซับซ้อนได้อย่างรวดเร็ว ในขณะที่หน่วยประมวลผล Intel's cerebellum ช่วยให้ควบคุมข้อต่อได้แบบเรียลไทม์ อินเทอร์เฟซมาตรฐานช่วยให้เราหลุดพ้นจากการพัฒนาไดรเวอร์ระดับต่ำและมุ่งเน้นไปที่นวัตกรรมอัลกอริทึมระดับสูงมากขึ้น”
ข้อมูลเชิงลึกของอุตสาหกรรม
1. การออกแบบแบบบูรณาการกำลังเป็นที่นิยม:"มันสมองและ "ซีรีเบลลัม" จำเป็นต้องทำงานร่วมกันอย่างลึกซึ้ง และสถาปัตยกรรมที่แยกจากกันได้กลายเป็นอุปสรรคต่อประสิทธิภาพ
2. การกำหนดมาตรฐานสร้างมูลค่า:การกำหนดมาตรฐานของอินเทอร์เฟซฮาร์ดแวร์และมิดเดิลแวร์ซอฟต์แวร์สามารถลดความซับซ้อนในการบูรณาการได้อย่างมาก
3. รูปแบบใหม่ของความร่วมมือทางนิเวศวิทยา:ซัพพลายเออร์ควรเปลี่ยนบทบาทเป็น "พันธมิตรด้านโซลูชัน" และมีส่วนร่วมอย่างลึกซึ้งในการพัฒนาลูกค้าตั้งแต่เริ่มต้น
05
ข้อได้เปรียบหลักของโซลูชัน APQ
ความได้เปรียบทางเทคนิค
- สถาปัตยกรรมฟิวชั่น: AGX Orin+Intelสมองใหญ่และสมองน้อยบรรลุการตัดสินใจและการควบคุมฮาร์ดแวร์แบบรวมศูนย์ หลีกเลี่ยงปัญหาคอขวดของบัสข้อมูล
- ความยืดหยุ่นในการขยาย: รองรับการกำหนดค่าต่างๆ ตั้งแต่ 12 ข้อต่อถึง 32 ข้อต่อ และประสิทธิภาพของสมองส่วนซีรีเบลลัมสามารถอัพเกรดเป็น I7 13700H ได้
- ระบบนิเวศแบบเปิด: สามารถใช้งานร่วมกับสภาพแวดล้อมการพัฒนาหลักๆ เช่น ROS 2, MATLAB/Simulink ได้อย่างสมบูรณ์
ข้อดีของการบริการ
- ความร่วมมือแบบครบวงจร: ให้บริการพัฒนาร่วมกันตั้งแต่การออกแบบโซลูชันไปจนถึงการสนับสนุนการผลิตจำนวนมาก
- การแบ่งปันประสบการณ์: จากประสบการณ์การพัฒนาหุ่นยนต์ที่ประสบความสำเร็จของลูกค้ากว่า 50 ราย เราช่วยให้พวกเขาพัฒนาไปได้อย่างรวดเร็ว
- ตอบสนองรวดเร็ว: การวินิจฉัยระยะไกลตลอด 24 ชั่วโมง 7 วันต่อสัปดาห์ + การสนับสนุน ณ สถานที่ 48 ชั่วโมง เพื่อให้มั่นใจว่าโครงการจะดำเนินไปอย่างราบรื่น

ในยุคที่การพัฒนาอุตสาหกรรมหุ่นยนต์กำลังเร่งตัวขึ้น ประสิทธิภาพในการพัฒนาจึงกลายเป็นกุญแจสำคัญในการแข่งขัน โดยผ่านสถาปัตยกรรมความร่วมมือของ "สมองใหญ่และสมองน้อย“ด้วยบริการเชิงลึก APQ ไม่เพียงแต่ช่วยให้ลูกค้าลดรอบการพัฒนาลงได้ถึง 40% เท่านั้น แต่ยังยืนยันถึงคุณค่าที่สำคัญของการออกแบบแบบบูรณาการในระบบหุ่นยนต์ที่ซับซ้อนอีกด้วย เราหวังเป็นอย่างยิ่งที่จะได้ร่วมงานกับพันธมิตรมากขึ้นเพื่อร่วมกันส่งเสริมการมาถึงของยุคแห่งปัญญาประดิษฐ์แบบฝังตัว”
หากคุณสนใจบริษัทและผลิตภัณฑ์ของเรา โปรดติดต่อตัวแทนต่างประเทศของเรา คุณโรบิน ได้เลย
Email: yang.chen@apuqi.com
WhatsApp: +86 18351628738
วันที่โพสต์: 9 มกราคม 2026